Stepper motor driver
Leadshine ND556
Analog Technology, max. 50V/5.6A
 Download data sheet
Download user manual
Download data sheet
Download user manual
The ND556 is a high performance microstepping drive based on pure-sinusoidal current control technology. Owing to that and the self-adjustment technology (self-adjust current control parameters) according to different motors, the driven motors can run with less noise, generating less heat, move smoother and have better performance at higher speed than most of the drives on the market. In contrast to the M542, the ND556 can be operated over a large supply voltage range and provides higher output current. It is suitable for driving 2-phase and 4-phase hybrid stepping motors.
- High performance, cost-effective
- Supply voltage up to +50VDC
- Output current up to 5.6A
- Output current selectable in 8 steps via DIP-switch
- Automatic idle-current reduction (in standstill mode) to reduce motor heating; function switchable
- Pure-sinusoidal current control technology
- Pulse input frequency up to 400 kHz
- TTL compatible and optically isolated input
- 15 selectable resolutions in decimal and binary, up to 25,600 steps/rev
- Suitable for 2-phase and 4-phase motors
- Support PUL/DIR and CW/CCW modes
- Short-voltage, over-voltage, over-current protections
| Parameters | Min | Typ. | Max | Unit |
| Output current | 1.0 | - | 5.6 (4.0 RMS) | A |
| Supply voltage | +20 | +36 | +50 | VDC |
| Logic signal current | 7 | 10 | 16 | mA |
| Puls input frequency | 0 | - | 400 | kHz |
| Insulation resistance | 500 | MO |
| Parameters | Min | Typ. | Max |
| Microsteps/1.8° | 400 | 25,600 | |
| PUL/PUL CW | X | ||
| Double pulse CCW | Optional | ||
| NEMA sizes | 17 | 34 | |
| Motor type Mecheltron | 42BYGH-XXXX | 86BYGH-XXXX |
Suitable for a wide range of stepping motors of NEMA sizes 17, 23, 24 and 34 (42x42 mm to 86x86 mm). It can be used in various kinds of machines, such as X-Y tables, engraving machines, labeling machines, laser cutters, pick-place devices, and so on. Particularly well suited for applications where low noise levels, less heat development, high speed and high precision are desired.
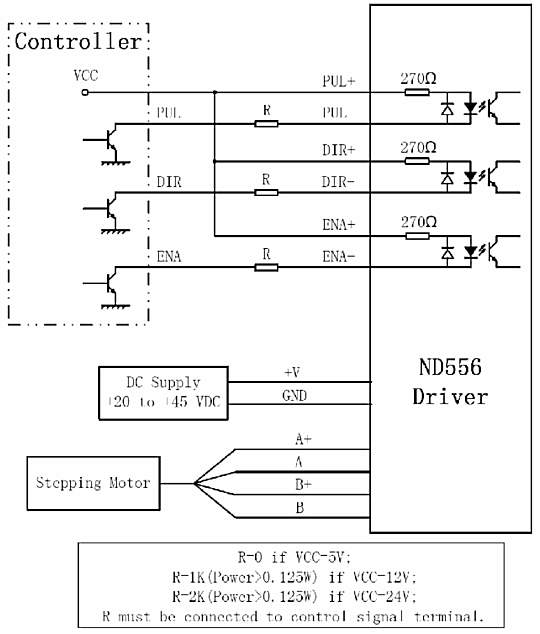
A typical system consists of stepper motor, stepper motor driver, power supply and controller. The following image shows a typical connection schematic: