

Hybrid Servo Driver
Leadshine HBS57
 Download data sheet
Download data sheet Download driver Software
Download driver Software
Product description:
The HBS series offers an alternative for applications requiring high performance and high reliability when the servo was the only choice, while it remains cost-effective. The system includes a 3-phase stepper motor combined with a fully digital, high performance drive and an internal encoder which is used to close the position, velocity and current loops in real time, just like servo systems. It combines the best of servo and stepper motor technologies, and delivers unique capabilities and enhancements over both, while at a fraction of the costs of a servo system.
Features:
- Closed-loop, eliminates loss of synchronization
- Broader operating range – higher torque and higher speed
- Reduced motor heating and more efficient
- Smooth motion and super-low motor noise
- Do not need a high torque margin
- No tuning and always stable
- Fast response, no delay and almost no settle time
- High torque at starting and low speed, high stiffness at standstill
- Lower cost
Electrical specifications:
|
Parameters
|
Min | Typical. |
Max
|
Unit |
|
Output current
|
0
|
-
|
8.0 (Peak)
|
A
|
|
Input voltage
|
20
|
36
|
50
|
VDC
|
|
Logic signal current
|
7
|
10
|
16
|
mA
|
|
Pulse input frequency
|
0
|
-
|
200
|
kHz
|
|
Insulation resistance
|
500
|
MΩ
|
Connector Configuration
|
Control Signal Connector - Screw Terminal
|
|||
|
Pin
|
Name
|
I/O
|
Description
|
|
1
|
PUL+
|
I
|
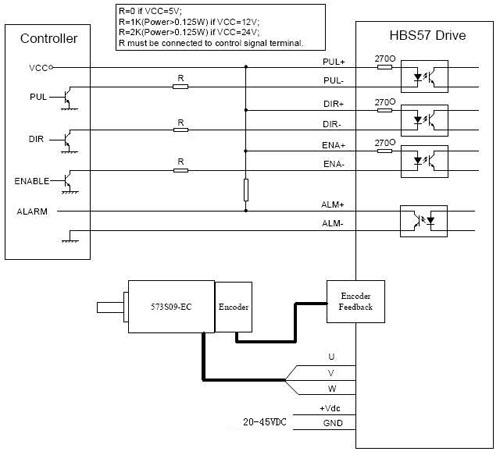
Pulse signal: In single pulse (pulse/direction) mode, this input represents pulse signal, each rising or falling edge active (software configurable, see hybrid servo software operational manual for more detail); In double pulse mode (software configurable), this input represents clockwise (CW) pulse, active both at high level and low level. 4-5V when PUL-HIGH, 0-0.5V when PUL-LOW. For reliable response, pulse width should be longer than 10µs. Series connect resistors for current-limiting when +12V or +24V used. The same as DIR and ENA signal.
|
|
2
|
PUL-
|
I
|
|
|
3
|
DIR+
|
I
|
Direction signal: In single-pulse mode, this signal has low/high voltage levels, representing two directions of motor rotation. In double-pulse mode (software configurable), this signal is counter-clock (CCW) pulse, active both at high level and low level. For reliable motion response, DIR signal should be ahead of PUL signal by 5µs at least. 4-5V when DIR-HIGH, 0-0.5V when DIR-LOW. Please note that rotation direction is also related to motor-driver wiring match. Exchanging the connection of two wires for a coil to the driver will reverse motion direction. The direction signal’s polarity is software configurable.
|
|
4
|
DIR-
|
I
|
|
|
5
|
ENA+
|
I
|
Enable signal: This signal is used for enabling/disabling the driver. In default, high level for enabling the driver and low level for disabling the driver (@ NPN control signal). Usually left UNCONNECTED (ENABLED). Please note that PNP and Differential control signals are on the contrary, namely low level for enabling. The active level of ENA signal is software configurable.
|
|
6
|
ENA-
|
I
|
|
|
7
|
ALM+
|
O
|
Alarm Signal: OC output signal, active when one of the following protection is activated: over-voltage, over current, short circuit and position following error. This port can sink or source 20mA current at 24V. In default, the resistance between ALM+ and ALM- is low impedance in normal operation and become high when HBS57 goes into error. The active level of alarm signal is software configurable. See software operation manual for more details.
|
|
8
|
ALM-
|
O
|
|
|
Encoder Feedback Connector - DSub15 Female
|
|||
|
Pin
|
Name
|
I/O
|
Description
|
|
1
|
EA+
|
I
|
Encoder channel A+ input
|
|
2
|
EB+
|
I
|
Encoder channel B+ input
|
|
3
|
EGD
|
GND
|
Signal ground
|
|
4
|
HW
|
I
|
Reserved
|
|
5
|
HU
|
I
|
Reserved
|
|
6
|
FG
|
GND
|
Ground terminal for shield
|
|
7
|
EZ+
|
I
|
Reserved
|
|
8
|
EZ-
|
I
|
Reserved
|
|
9
|
HV
|
I
|
Reserved
|
|
10
|
NC
|
-
|
Not connected
|
|
11
|
EA-
|
I
|
Encoder channel A- input
|
|
12
|
EB-
|
I
|
Encoder channel B- input
|
|
13
|
VCC
|
O
|
+5V @ 100 mA max.
|
|
14
|
NC
|
-
|
Not connected
|
|
15
|
NC
|
-
|
Not connected
|
|
Power and Motor Connector - Screw Terminal
|
|||
|
Pin
|
Name
|
I/O
|
Description
|
|
1
|
U
|
O
|
Motor phase U
|
|
2
|
V
|
O
|
Motor phase V
|
|
3
|
W
|
O
|
Motor phase W
|
|
4
|
+Vdc
|
I
|
Power supply input (Positive) |
|
5
|
GND
|
GND
|
Power ground (Negative)
|
Typical Connection
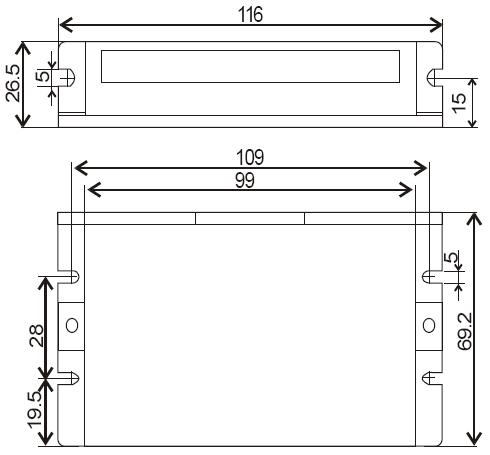
Mechanical Specifications (unit: mm)
English
