

Servomotor Steuerung Leadshine ACS806
 Datenblatt herunterladen Anschlussbeschreibung (englisch) herunterladen Softwarehandbuch (englisch) herunterladen
Datenblatt herunterladen Anschlussbeschreibung (englisch) herunterladen Softwarehandbuch (englisch) herunterladen ProTuner Software herunterladenKonfigurationsdatei für ACM602/604-01-2500 Motoren herunterladenRS232 Pin layout herunterladen
ProTuner Software herunterladenKonfigurationsdatei für ACM602/604-01-2500 Motoren herunterladenRS232 Pin layout herunterladen
Leadshines voll digitaler AC-Servoantrieb ACS806 wird mit einem 32-Bit-DSP entwickelt, der auf einem erweiterten Steueralgorithmus basiert. Da es sich bei den Eingangsbefehlen um Pus- / Richtungs-Signale handelt, können Anwender von Schrittmotorantrieben auf den ACS806 umstellen, ohne die Steuerungssysteme ändern zu müssen. Der ACS806 bietet hohe Präzision, hohe Geschwindigkeit, hohe Zuverlässigkeit und Leistung. Er wird weit verbreitet in Tintenstrahldruckern, Graviermaschinen, etc. verwendet. Ein eingebauter Controller kann für Prüfung und Tuning verwendet werden. PC-basierte und Handheld-Konfigurations- und Tuning-Tools können unterschiedlichste Anforderungen erfüllen.
- Eingangsspannungsbereich: 18 – 80 V DC
- Strom: 18 A (Peak) , Dauerstrom: 6 A (max.), 50 - 400 W
- FOC-SVPWM Technologie
- Konfiguration PC basiert oder mit Hand-Konfigurationsgerät (STU-ACS Handgerät)
- Elektronische Übersetzung von 1/255 bis 255
- Selbsttest-Funktion mit trapezförmigem Geschwindigkeitsprofil
- Unterstützt PUL / DIR und CW / CCW Kontrollsignale
- Optisch-isoliert, unterstützt referenzbezogene und differenzielle Signalpegel
- Encoder-Ausgang
- Grenze für die Abschaltung bei Positionsfehler einstellbar
- Überspannungs- und Überstromschutz; Schutz bei Encoderfehler
- Automatische Aufzeichnung der 10 letzten Fehler
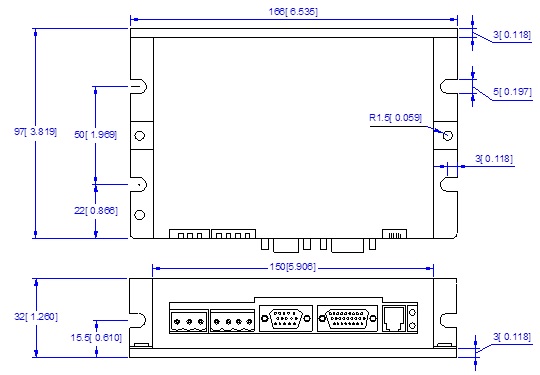
- Kleine Baugröße
Geeignet für große und mittlere Automatisierungsmaschinen und Ausrüstungen wie Tintenstrahldrucker, Graviermaschinen, Elektronikfertigungsausrüstungen, spezielle NC-Maschinen, Pick-and-Place-Geräte, Verpackungsgeräte usw. Besonders gut an Applikationen anzupassen, die hohe Geschwindigkeit, hohe Präzision und geringe Motorgeräusche erfordern.
|
Parameter
|
Min
|
Typ.
|
Max
|
Unit
|
|
Ausgangsstrom (Peak)
|
0
|
-
|
18
|
A
|
| Dauerstrom |
0
|
-
|
6
|
A
|
| Eingangsspannung |
+18
|
-
|
+80
|
VDC
|
| Steuerstrom |
7
|
10
|
16
|
mA
|
| Puls-Eingangsfrequenz |
0
|
-
|
600
|
kHz
|
| Isolationswiderstand |
500
|
-
|
-
|
MΩ
|
| Strom für Encoder |
-
|
-
|
100
|
mA
|
- Positionsfehler Soll / Ist: +/-1 Encoderschritt
- Genauigkeit Drehzahl: +/-2rpm
- Maximale Beschleunigung ohne Last : 80 rpm/ms2
- Eingangsfrequenz: bis zu 600 kHz
- Maximale Drehzahl : 4000 rpm
- Zulässige Mindestdrehzahl: 1 rpm
- Positionsgenauigkeit :+/-1 Encoderschritt
- Geeignet für 18 - 80 V DC AC Servomotoren
|
Kühlung |
Natürlich oder mit Lüfter |
|
|
Operating |
Umgebung |
Öl, Nebel und korrosive Gase sind zu vermeiden. |
|
Umgebungs- temperatur |
0 ℃ - 50 ℃ (32 ℉ - 122 ℉) |
|
|
Luftfeuchtigkeit |
40 % RH - 90 % RH |
|
|
Vibration |
Max. 5.9 m/s2 |
|
|
Lagertemperatur |
-20 ℃ - 65 ℃ (-4 ℉ - 149 ℉) |
|
|
Gewicht |
450 g (15.88 oz) |
|
|
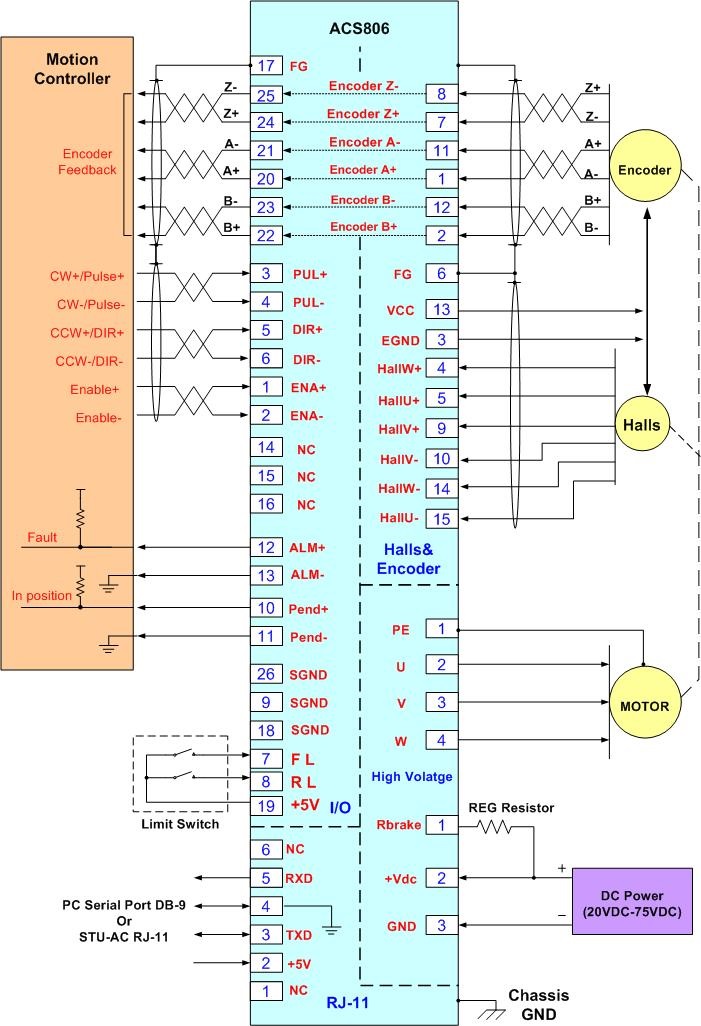
Digitaler & analoger I/O Anschluss (D-Sub 26) |
|||
|
Pin |
Signal |
Beschreibung |
I/O |
|
1 |
ENA+ |
Freigabe-Signal Eingang + (Enable signal input +) |
I |
|
2 |
ENA- |
Freigabe-Signal Eingang – (Enable signal input -) |
I |
|
3 |
PUL+ |
Puls-Signal Eingang + (Pulse signal input +) |
I |
|
4 |
PUL- |
Puls-Signal Eingang – (Pulse signal input -) |
I |
|
5 |
DIR+ |
Richtungs-Signal Eingang + (Direction signal input +) |
I |
|
6 |
DIR- |
Richtungs-Signal Eingang – (Direction signal input -) |
I |
|
7 |
FL |
Begrenzungssignal Eingang positiv (Positive limit signal input) |
I |
|
8 |
RL |
Begrenzungssignal Eingang negativ (Negative limit signal input) |
I |
|
9 |
SGND |
Signal Masse (Signal ground) |
GND |
|
10 |
Pend+ |
Positionsfehler Signal Ausgang + (In position signal output+) |
O |
|
11 |
Pend- |
Positionsfehler Signal Ausgang - (In position signal output-) |
O |
|
12 |
ALM+ |
Alarm Ausgang + (Alarm output signal+) |
O |
|
13 |
ALM- |
Alarm Ausgang – (Alarm output signal-) |
O |
|
14 |
NC |
Nicht belegt (Not connected) |
- |
|
15 |
NC |
Nicht belegt (Not connected) |
- |
|
16 |
NC |
Nicht belegt (Not connected) |
- |
|
17 |
FG |
Anschluß für Abschirmung (Ground terminal for shield) |
GND |
|
18 |
SGND |
Signal Masse (Signal ground) |
GND |
|
19 |
+5V |
Ausgang +5V@10mA (+5V@10mA power supply) |
O |
|
20 |
A+ |
Encoderkanal A+ Ausgang (Encoder channel A+ output) |
O |
|
21 |
A- |
Encoderkanal A- Ausgang (Encoder channel A- output) |
O |
|
22 |
B+ |
Encoderkanal B+ Ausgang (Encoder channel B+ output) |
O |
|
23 |
B- |
Encoderkanal B- Ausgang (Encoder channel B- output) |
O |
|
24 |
Z+ |
Encoderkanal Z+ Ausgang (Encoder channel Z+ output) |
O |
|
25 |
Z- |
Encoderkanal Z- ( Ausgang Encoder channel Z- output) |
O |
|
26 |
SGND |
Signal Masse (Signal ground) |
GND |
|
Halls & Encoder Anschluss (D-Sub 15) |
|||
|
Pin |
Signal |
Beschreibung |
I/O |
|
1 |
EA+ |
Encoderkanal A+ Eingang (Encoder channel A+ input) |
I |
|
2 |
EB+ |
Encoderkanal B+ Eingang (Encoder channel B+ input) |
I |
|
3 |
EGND |
Signal Masse (Signal ground) |
GND |
|
4 |
HallW+ |
Hallsensor W+ Eingang (Hall sensor W+ input) |
I |
|
5 |
HallU+ |
Hallsensor U+ Eingang (Hall sensor U+ input) |
I |
|
6 |
FG |
Anschluß für Abschirmung (Ground terminal for shield) |
GND |
|
7 |
EZ+ |
Encoderkanal Z+ Eingang (Encoder channel Z+ input) |
I |
|
8 |
EZ- |
Encoderkanal Z- Eingang (Encoder channel Z- input) |
I |
|
9 |
HallV+ |
Hallsensor V+ Eingang (Hall sensor V+ input) |
I |
|
10 |
HallV- |
Hallsensor V- Eingang (Hall sensor V- input) |
I |
|
11 |
EA- |
Encoderkanal A- Eingang (Encoder channel A- input) |
I |
|
12 |
EB- |
Encoderkanal B- Eingang (Encoder channel B- input) |
I |
|
13 |
VCC |
+5V @ 100 mA max. |
O |
|
14 |
HallW- |
Hallsensor W- Eingang (Hall sensor W- input) |
I |
|
15 |
HallU- |
Hallsensor U- Eingang (Hall sensor U- input) |
I |
|
Leistungs-Anschluss |
|||
|
Pin |
Signal |
Beschreibung |
I/O |
|
1 |
PE |
Motorgehäuse Masse (Motor case ground) |
GND |
|
2 |
U |
Motor Phase U (Motor phase U) |
O |
|
3 |
V |
Motor Phase V (Motor phase V) |
O |
|
4 |
W |
Motor Phase W (Motor phase W) |
O |
|
5 |
Rbrake |
Anschluss Bremswiderstand (Brake resistor connection (VDC-RBrake)) |
I |
|
6 |
+Vdc |
Eingang Gleichspannung 18-80 V DC (power Input (18-80 V DC)) |
I |
|
7 |
GND |
Masse (Power Ground) |
GND |
|
RS232 Kommunications-Anschluss |
|||
|
Pin |
Signal |
Beschreibung |
I/O |
|
1 |
NC |
Nicht belegt (Not connected) |
- |
|
2 |
+5V |
+5 V Ausgang, nur für STU-ACS Handgerät (+5V power only for STU) |
O |
|
3 |
TxD |
RS232 Übertragung (RS232 transmit) |
O |
|
4 |
GND |
Masse (Ground) |
GND |
|
5 |
RxD |
RS232 Empfang (RS232 receive) |
I |
|
6 |
NC |
Nicht belegt (Not connected) |
- |
|
Signal |
Beschreibung |
|
ENA+/ENA- |
Aktivierungs-Signal: Dieses Signal wird zur Aktivierung / Deaktivierung der Steuerung verwendet. Standardmäßig bedeutet hohes Niveau Freigabe, und niedriges Niveau Deaktivierung der Steuerung (bei Verwendung von NPN-Logik). Normalerweise nicht angeschlossen (=aktivierte Steuerung). |
|
PUL+/PUL- |
Pulssignal: Im Puls-Richtungs-Modus ist dieser Eingang für das Eingangspulssignal, jeweils steigende oder fallende Flanke aktiv (über Software konfigurierbar, siehe Hybrid Servo Software Betriebshandbuch für weitere Einzelheiten); Im Doppel-Puls-Modus (Software konfigurierbar), ist dieser Eingang für den Puls im Uhrzeigersinn (CW), aktiv auf hohem sowohl auch auf niedrigem Niveau. Spannungen: 4-5V, wenn PUL-HIGH, 0-0.5V, wenn PUL-LOW. Für einen zuverlässigen Betrieb sollte die Impulsbreite länger als 2,5 µs sein. Bei +12 V oder +24 V zur Strombegrenzung Widerstände seriell schalten. Das gleiche gilt für das DIR und ENA-Signal. |
|
DIR+/DIR- |
Richtungs-Signal (Direction): Im Puls-Richtungs-Modus ist dieser Eingang für die low / high Spannungsebenen, die zwei Richtungen des Motors. In Doppel-Puls-Modus (Software konfigurierbar), ist dieser Eingang für den Puls gegen den Uhrzeigersinn (CCW), aktiv auf hohem sowohl auch auf niedrigem Niveau. Für eine zuverlässige Reaktion sollte das DIR Signal mindestens 5 µs vor dem PUL Signal anliegen, Spannungen: 4-5 V für DIR-HIGH, 0-0.5 V für DIR-LOW. |
|
FL/RL |
Positives und negatives Endschalter- oder Referenzschalter- Eingangssignal, sind bezogen auf Signal-Masse (SGND). Spannungen: 4-5 V für HIGH, 0-0.5 V für LOW. Die aktive Ebene des Alarmsignals ist per ProTuner-Software oder dem STU-ACS Handgerät konfigurierbar. Aktiv bei niedrigem Pegel (low level) heißt, daß für normalen Betrieb die Eingänge auf hohem Pegel gehalten werden müssen. Der Treiber wird die Motorspulen kurzschließen um den Motor anzuhalten, sobald FL/RL auf niedrigen Pegel fällt. Aktiv bei hohem Pegel: Enstsprechend umgekehrt. Wenn Anschlüsse FL/RL nicht benutzt werden, wählen Sie „aktiv bei hohem Pegel“ („active at high level”) aus! |
|
Pend+/Pend- |
Positionsfehler-Signalausgang. OC Ausgang, hohe Impedanz wenn der Positionsfehler mehr als 2 Pulse beträgt und niedrige Impedanz wenn der Positionsfehler weniger als 2 Pulse ist. |
|
ALM+/ALM- |
Alarmsignal: OC Ausgangssignal aktiv, wenn eine der folgenden Fehlermeldungen aktiviert ist: Überspannungs-, Überstrom-, Kurzschlussschutz und Positionsfehler. Der Widerstand zwischen ALM + und ALM- ist im Normalbetrieb hoch und wird bei Fehlermeldung niedrig. |
|
A+/A-/B+ /B-/Z+/Z- |
Encoderkanäle-Signalausgänge, für externe Benutzung. |
|
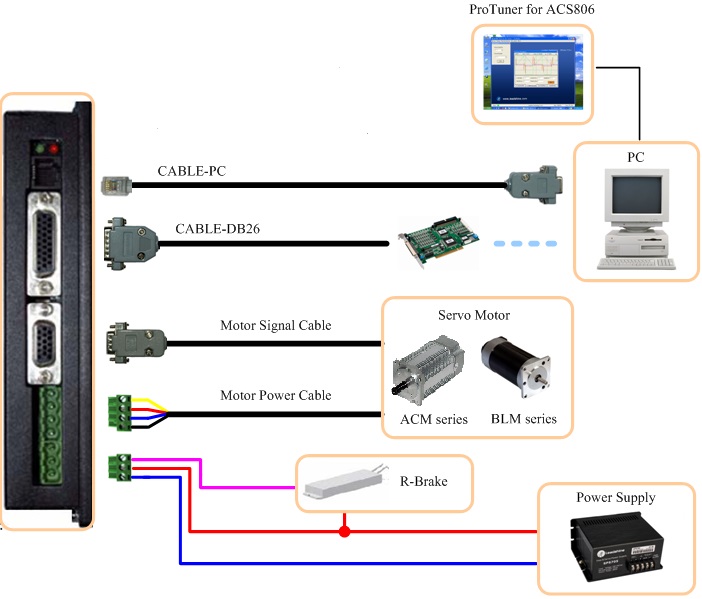
ProTuner |
|
|
Beschreibung |
PC-based configuration & tuning software. |
|
Bezug |
Standard Accessory, user can download from https://mecheltron.com/en/service website for free. |
|
|
|
|
CABLE-PC |
|
|
Beschreibung |
Datenkabel für die Kommunikation zwischen ACS806 und PC zur Konfiguration mit ProTuner. |
|
Bezug: |
Standard Zubehör, ein Kabel genügt zur Konfiguration von mehreren Treibern. |
|
|
|


