

ELD5-400 und ELD5-750 Servomotortreiber
Digital Technologie, max. 55 V DC/ 7,0 A/ 50 – 400 W/ 750 W

- Einfache Abstimmung
- 3 verschiedene Modi:
- Position Mode: Steuerung durch Puls und Richtungssignale
- Velocity Mode: Steuerung der Geschwindigkeit durch ein analoges Eingangssignal -10 V bis +10 V, z.B. für Anwendungen die konstante oder variable Drehzahl benötigen.
- Torque Mode: Steuerung des Drehmoments durch ein analoges Eingangssignal -10 V bis +10 V, z.B. für eine Wickelfunktion. Falls kein Drehmoment abgerufen wird ist die maximale Drehzahl per Software konfigurierbar.
- Automatisch Erkennung für Motore mit 17 bit und 23 bit Encoder
- Einfach und variabel zu Steuern
- RS485/ Modbus/ Canopen
- Kerbfilter, Dämpfungsfilter
- Optionales Feedback
|
Leistung & Umgebung |
|||
|
Treibermodell |
ELD5-400/ ELD5-400Z |
ELD5-750/ ELD5-750Z |
|
|
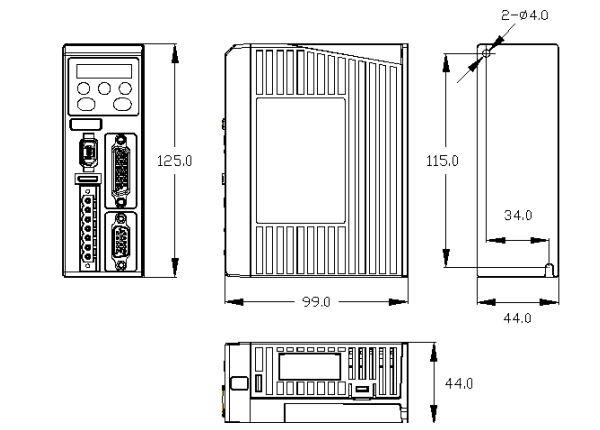
Größe (mm) |
125 x 99 x 44 |
||
|
Nennleistung (kw) |
0,4 |
0,75 |
|
|
Nennstrom (A) |
10 |
20 |
|
|
Max. Strom(A) |
30 |
60 |
|
|
Hauptleistung |
Spannung (V) |
V DC 24 - 55 (empfohlen 24 - 48 V DC) |
|
|
Strom (A) |
10 |
20 |
|
|
24 - 55 V DC: 7 A |
24 - 55 V DC: 14 A |
||
|
Steuerleistung |
Spannung (V) |
DC 12 - 24 |
|
|
Strom (mA) |
≥ 12 |
||
|
Steuerungsart |
IGBT PWM sinusoidal Wave Drive |
||
|
Überlast |
300 % |
||
|
Bremswiderstand |
Externe Verbindung |
||
|
Kommunikationsschnittstelle |
Modbus (RS232 oder RS485), CANopen |
||
|
Schutzart |
IP20 |
||
|
Kommunikation & Verbindung |
|
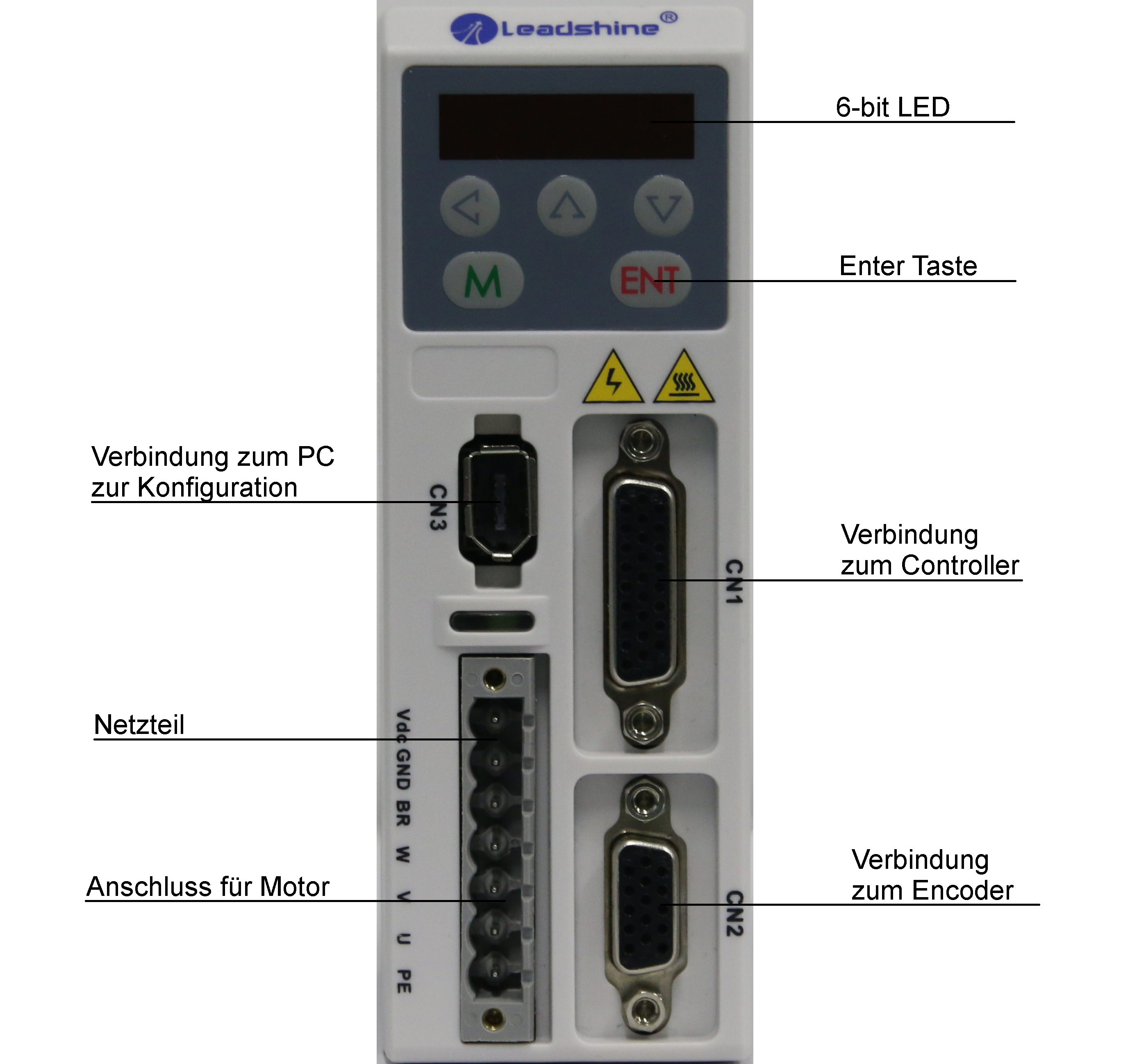
|
Kommunikation mit PC |
1394a (wie FireWire400) 6 pol. für RS232 oder RJ45 für RS485 |
|
Puls Eingang |
2 schnelle Impulseingänge, 5 V - 24 V voll kompatibel |
|
Puls Encoder Ausgang |
5 V differential Ausgang, A/ B/ Z Phase (optional Frequenzteiler) |
|
Digitaler Eingang/ Ausgang |
4 programmierbare OC Ausgänge, 5 programmierbare OC Eingänge |
|
Analog Eingang |
1 Analog Eingang: -10 V bis +10 V |
|
Unterstütztes Feedback |
1000 line und 2500 line inkrementelle Encoder (ELD5-400/ELD5-750) |
|
serielle Encoder (ELD5-400Z/ ELD5-750Z) |
|
|
Lager-Voraussetzungen |
|
|
Artikel |
ELD5 Serie Treiber |
|
Temperatur |
-20 - 80 ℃ |
|
Luftfeuchtigkeit |
Unter 90 %RH (frei von Kondensation) |
|
Umgebung |
Innenraum, (nicht freigelegt) kein korrosives oder entzündliches Gas, Kein Öl oder Staub |
|
Höhe |
Unter 1000 m |
|
Schutzart |
IP00 (kein Schutz) |
|
Installations-Voraussetzungen |
|
|
Artikel |
ELD5 Serie Treiber |
|
Temperatur |
0 - 55 ℃ |
|
Luftfeuchtigkeit |
Unter 90 %RH (frei von Kondensation) |
|
Umgebung |
Innenraum, (nicht freigelegt) kein korrosives oder entzündliches Gas, Kein Öl oder Staub |
|
Höhe |
Unter 1000 m |
|
Schutzart |
IP00 (kein Schutz) |
|
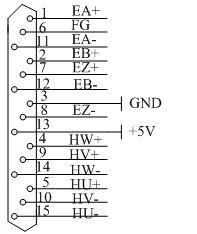
Encoder Eingangsanschluss-CN2 für ELD5-400 / ELD5-750 |
|||
|
Pin |
Schema |
Signal |
Name |
|
1 |
|
EA+ |
Encoder Kanal A+ Eingang |
|
2 |
EB+ |
Encoder Kanal B+ Eingang |
|
|
3 |
EGND |
Signal Masse |
|
|
4 |
Hall W+ |
Hall-Sensor W+ Eingang |
|
|
5 |
Hall U+ |
Hall-Sensor U+ Eingang |
|
|
6 |
FG |
Masse für Abschirmung |
|
|
7 |
EZ+ |
Encoder Kanal Z+ Eingang |
|
|
8 |
EZ- |
Encoder Kanal Z- Eingang |
|
|
9 |
Hall V+ |
Hall-Sensor V+ Eingang |
|
|
10 |
Hall V- |
Hall-Sensor V- Eingang |
|
|
11 |
EA- |
Encoder Kanal A- Eingang |
|
|
12 |
EB- |
Encoder Kanal B- Eingang |
|
|
13 |
VCC |
+5 V für Encoder Netzteil |
|
|
14 |
Hall W- |
Hall-Sensor W- Eingang |
|
|
15 |
Hall U- |
Hall-Sensor U- Eingang |
|
|
Encoder Eingang Port-CN2 für ELD5-400Z / ELD5-750Z |
||
|
Pin |
Signal |
Name |
|
3 |
EGND |
Signal Masse |
|
9 |
SD+ |
Encoder Signal |
|
10 |
SD- |
|
|
13 |
VCC |
+5 V für Encoder Netzteil |
|
|
BAT+ |
Nur für multi-turn absolute Encoder |
|
BAT- |
||
|
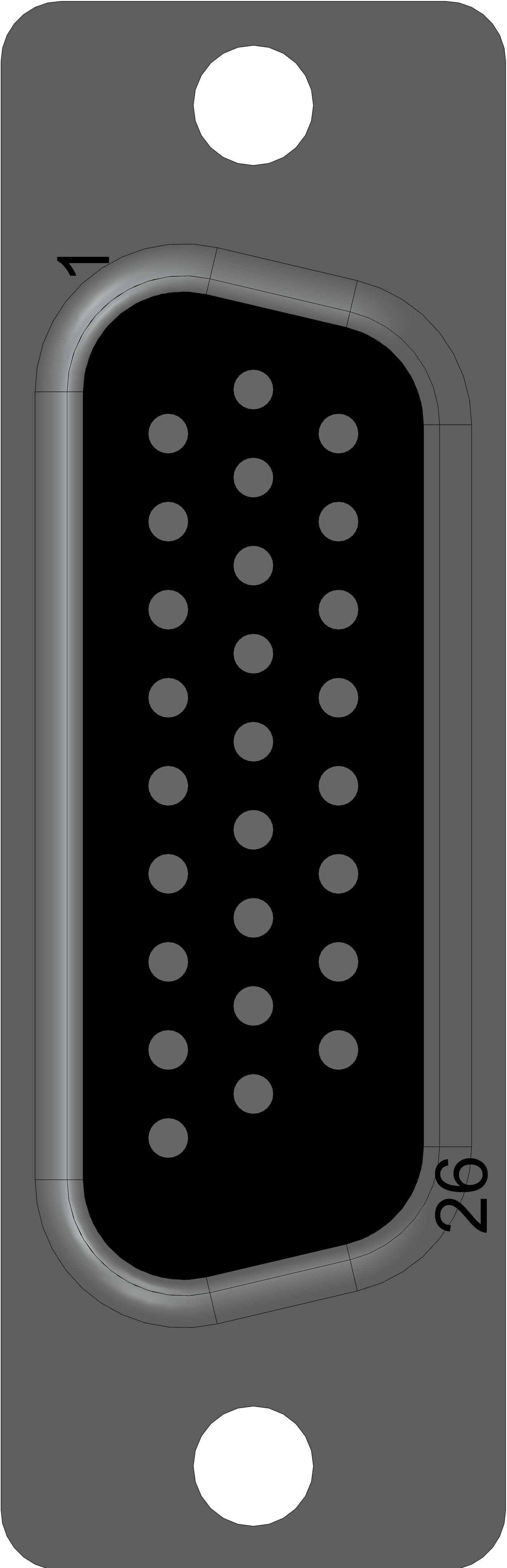
Steuersignalanschluss CN1 |
|||||
|
Pin |
Schema |
Signal |
E/A |
Detail |
|
|
1 |
|
COM+ |
Eingang |
Stromversorgung positiver Anschluss des externen Eingangssteuer Signals, 12 V ~ 24V |
|
|
2 |
SI1-Svon |
Eingang |
Digitales Eingangssignal 1, Standardwert ist Servosignal im Positionsmodus, niedriger Pegel ist standardmäßig verfügbar, die maximale Spannung ist 24 V. |
||
|
3 |
PUL+ |
Eingang |
Positiver bzw. negativer Impulseingang. TTL-Pegel (5 V), Standard ist die steigende Flanke |
||
|
4 |
PUL- |
Eingang |
|||
|
5 |
DIR+ |
Eingang |
Positive und negative Richtungseingabe. TTL-Pegel (5 V), Standard ist die steigende Flanke |
||
|
6 |
DIR- |
Eingang |
|||
|
7 |
SI2-FL |
Eingang |
Digitales Eingangssignal 2, Standardwert ist Signal für „forward run prohibited“ (POT) im Position Mode, niedriger Pegel als Standardeinstellung, max. Spannung ist 24 V-Eingang |
||
|
8 |
SI3-RL |
Eingang |
Digitales Eingangssignal 3, Standardwert ist „ reverse run prohibited“ (NOT) im Position Mode, niedriger Pegel als Standardeinstellung, max. Spannung ist 24 V-Eingang |
||
|
9 |
SI4-ZS |
Eingang |
Digitales Eingangssignal 4, Standardwert ist „ zero-speed clamp“ (ZEROSPD) im Position Mode, niedriger Pegel als Standardeinstellung, max. Spannung ist 24 V-Eingang |
||
|
10 |
SI5-CLR |
Eingang |
Digitales Eingangssignal 5,Standardwert ist „deviation counter clear“ input im Position Mode , niedriger Pegel als Standardeinstellung, max. Spannung ist 24 V-Eingang |
||
|
12 |
Vin+ |
Eingang |
Analog Eingang, Spannungsbereich : -10 V bis +10 V, |
||
|
13 |
SO1-RDY |
Ausgang |
Digitales Ausgangssignal 1, Standard-Wert ist “servo ready output” (S-RDY) im Position Mode |
OC beträgt die maximale Spannung / Stromstärke nicht mehr als 30 V, 50 mA.
Empfohlene Spannung: 12 V - 24 V.
Strom: 10 mA |
|
|
14 |
SO2- ALM |
Ausgang |
Digitales Ausgangssignal 2, Standard-Wert ist “alarm output“ (ALM) im Position Mode |
||
|
15 |
SO3- INP |
Ausgang |
Digitales Ausgangssignal 3, Standard-Wert ist “positioning complete” (INP) in Position Mode |
||
|
16 |
SO4- BRK |
Ausgang |
Digitales Ausgangssignal 4, Standard-Wert ist „external brake release output” (BRK-OFF) im Position Mode |
||
|
17 |
NC |
|
|
||
|
18 |
COM- |
Ausgang |
Masse des digitalen Ausgangssignals |
||
|
19 |
+5 V |
Ausgang |
Encodersignalausgang +5 V, 50 mA |
||
|
20 |
A+ |
Ausgang |
Positive/negative differentielle Ausgangsklemme des Motor-Encoders, |
||
|
21 |
A- |
Ausgang |
|||
|
22 |
B+ |
Ausgang |
Positive/negative differentielle Ausgangsklemme des Motor-Encoders, |
||
|
23 |
B- |
Ausgang |
|||
|
24 |
Z+ |
Ausgang |
Positive/negative differentielle Ausgangsklemme des Motor-Encoders, |
||
|
25 |
Z- |
Ausgang |
|||
|
26 |
GND |
Ausgang |
Masse |
||
|
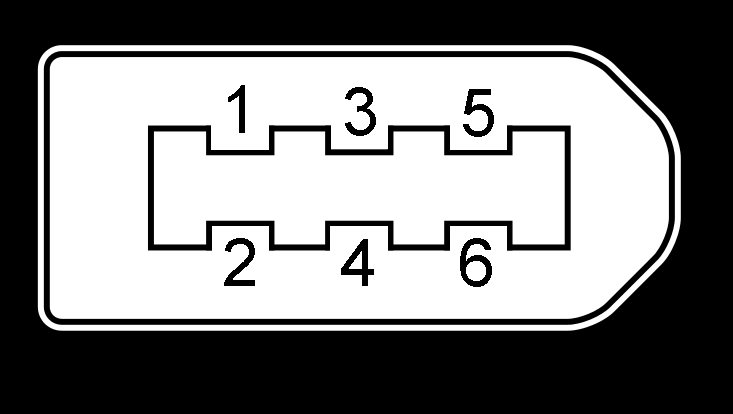
Kommunikationsanschluss CN3 |
|||
|
RS232 |
Um einen PC oder eine STU anzuschließen, verwenden Sie ein spezielles, serielles Kabel, das bei eingeschaltetem Gerät nicht angeschlossen werden darf. Es wird empfohlen, ein Twisted-Pair oder ein geschirmtes Kabel mit einer Länge von weniger als 2 Metern zu verwenden. |
||
|
RS485 |
Empfohlen wird ein geschirmtes Twisted-Pair Kabel |
||
|
Pin |
Schema |
Signal |
Name |
|
1 |
|
GND |
Masse |
|
2 |
TxD |
RS232 Sendeanschluss |
|
|
3 |
5 V |
reserviert, Strom ist unter 50mA |
|
|
4 |
RxD |
RS232 Empfangsanschluss |
|
|
5 |
RS485+ |
reserviert, RS485+ / A |
|
|
6 |
RS485- |
reserviert, RS485 - / B |
|
|
Anschluss Stromversorgung CN4 |
|||
|
Pin |
Schema |
Signal |
Name |
|
1 |
|
V DC |
+24 V ~ +55 V |
|
2 |
GND |
Masse |
|
|
3 |
RBr |
Eingang für Bremse |
|
|
4 |
W |
Motor Phase W |
|
|
5 |
V |
Motor Phase V |
|
|
6 |
U |
Motor Phase U |
|
|
7 |
PE |
Schirmung |
|

|
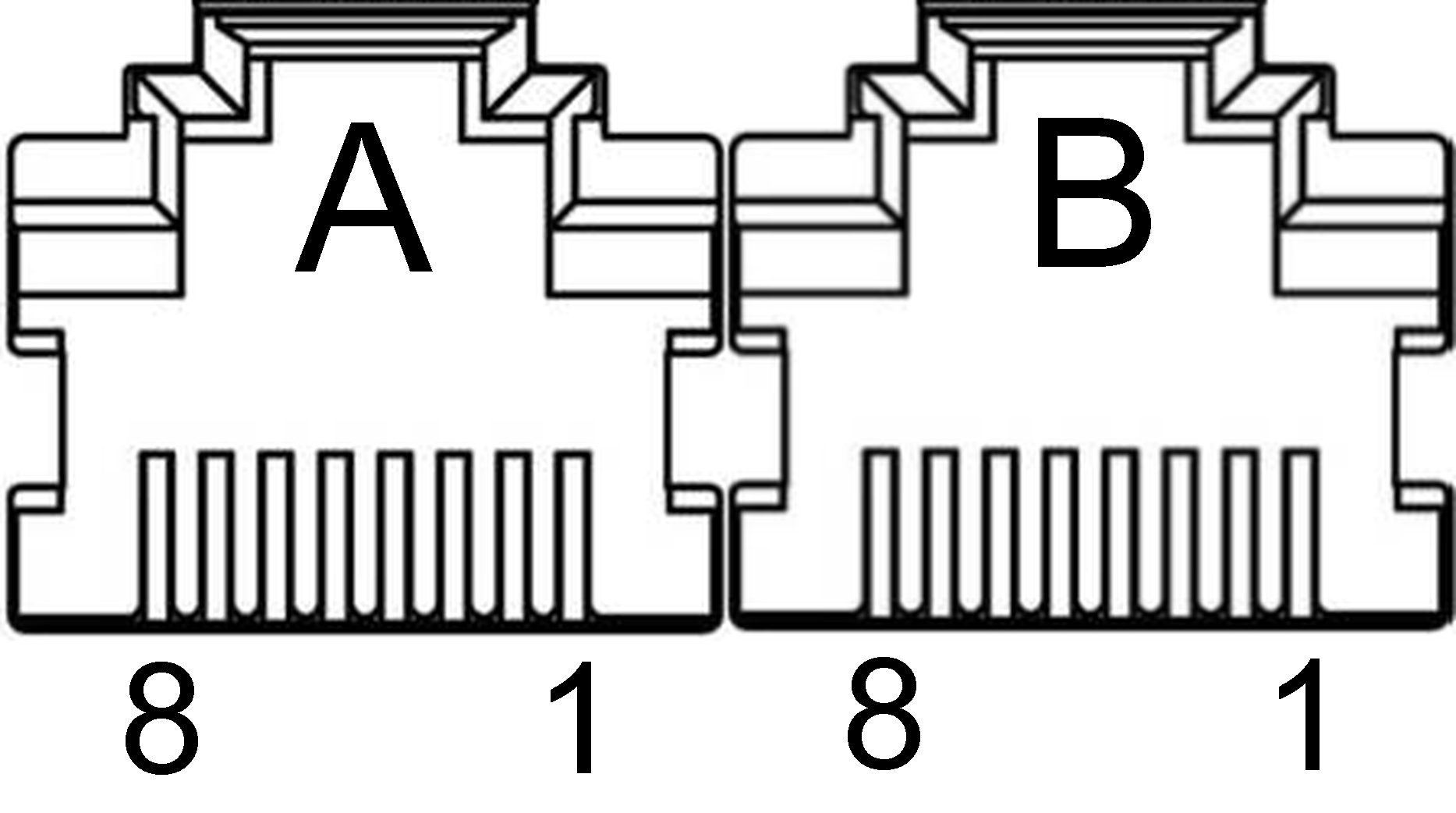
Bus Verbinder CN5 |
|||
|
Pin |
Schema |
Signal |
Detail |
|
A-1 |
|
RS485+ |
485data+ |
|
A-2 |
RS485- |
485 data- |
|
|
A-3 |
GND |
Masse |
|
|
A-7 |
GND |
Masse |
|
|
B-1 |
RS485+ |
485data+ |
|
|
B-2 |
RS485- |
485 data- |
|
|
B-3 |
GND |
Masse |
|
|
B-7 |
GND |
Masse |
|
Bei Motoren mit einem 1000 line oder 2500 line inkrementell Encoder müssen in der Software oder über das Tastenfeld die Werte PA_715 und PA_716, wie in der unten gezeigten Tabelle, abgeändert werden. Motore mit einem 5000 line, 17 bit oder 23 bit absolut Encoder werden automatisch erkannt.
|
Motor Type |
Pr715 |
Pr716 |
Motor Type |
Pr715 |
Pr716 |
|
ACM602V36-01-1000 |
1 |
33 |
ACM4010V24-T-2500 |
9 |
4 |
|
ACM604V36-01-1000 |
2 |
33 |
ACM602V36-T-2500 |
6 |
36 |
|
57BL180D-1000 |
3 |
33 |
ACM602V24-T-2500 |
7 |
36 |
|
BLM57180-1000 |
ACM604V48-T-2500 |
||||
|
ACM4005V24-T-2500 |
8 |
4 |
ACM604V60-T-2500 |
0 |
36 |
Die Einstellung der Anzahl der Impulse pro Umdrehung können mit der Software bzw. Tastenfeld über die Parameter PA_009 und PA_010 gemäß Handbuch vorgenommen werden.
Position Mode
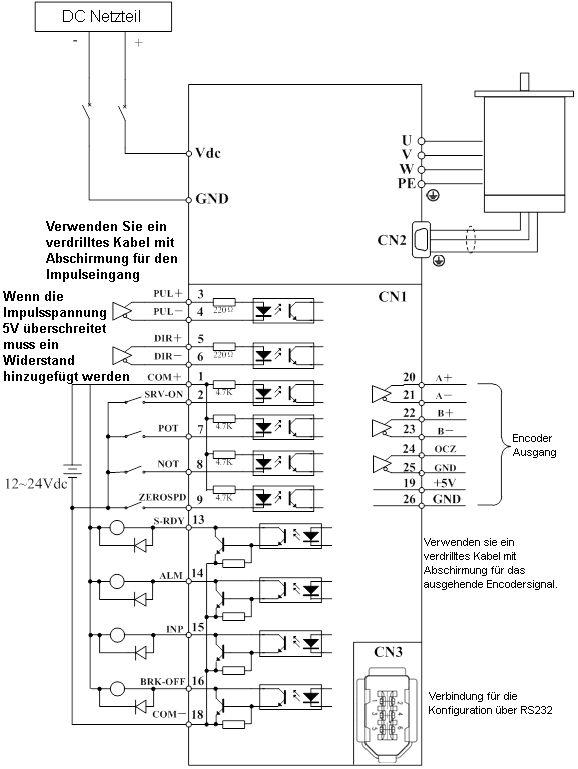
Position Mode Verdrahtung
Torque / Velocity Mode
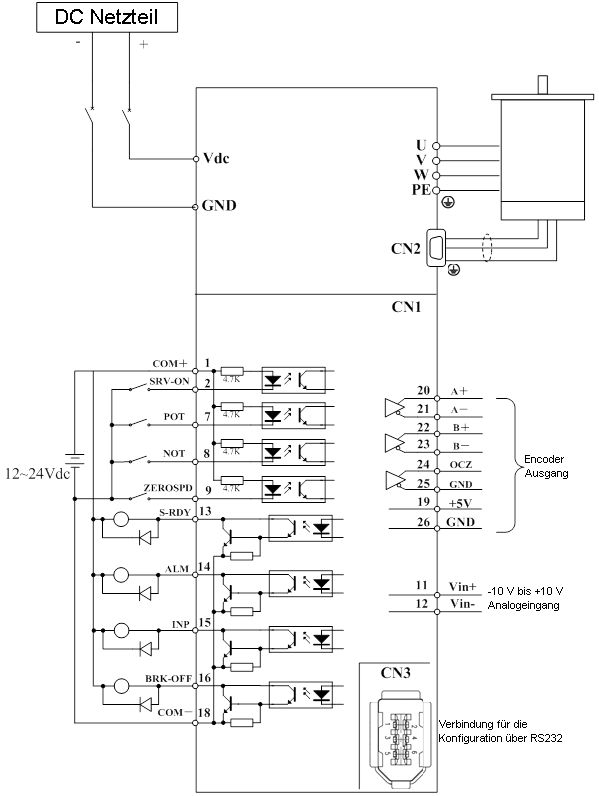
Torque / Velocity Mode Verdrahtung
