

ACM602V36-T-2500
 Datenblatt herunterladen
Datenblatt herunterladenBESCHREIBUNG:
Der ACM602V36-T-2500 ist ein bürstenloser 200 W AC-Servomotor mit einem optischen Inkrementalgeber mit 10.000 Pulsen pro Umdr. (2.500 Zeilen), mit 3000 min-1 kontinuierlicher Drehzahl und 5000 min-1 Höchstdrehzahl. Beim Betrieb mit der Leadshine ACS-Serie läuft dieser Servomotor sehr leise zwischen 1 min-1 und 5000 min-1 und mit sehr hoher Präzision. Er wird in hunderten von industriellen OEM-Anwendungen auf der ganzen Welt implementiert.
MERKMALE:
- Bürstenlose Konstruktion
- 60 mm Rahmengröße
- 36 V DC Nennspannung
- 200 W Nennleistung
- Encoder mit 2500 Schritten pro Umdrehung, inkrementiert auf 10000, mit A, B und Index Kanälen
- 0.64 Nm (90 oz-in) Nenndrehmoment / 1.81 Nm (270 oz-in) maximal
- 3000 min-1 Nenndrehzahl / 5000 min-1 max.
- Standardisierte Kabel zu ACS- Servosteuerungen als Option
GENERELLE SPEZIFIKATION:
|
|
ACM602V36-T-2500
|
|
Spannung (V)
|
36
|
| Nennleistung (W) |
200
|
| Nenndrehmoment (Nm) |
0.64
|
| Max. Drehmoment (Nm) |
1.91
|
| Nenndrehzahl (min-1) |
3000
|
| Maximaldrehzahl (min-1) |
5000
|
| Nennstrom (A) |
7.5
|
| Max. Strom (A) |
31.5
|
| Drehmomentkonstante (Nm/A) |
0.0918
|
| Back EMF Konstante (V/min-1) |
5.4
|
| Widerstand (Ω) |
0.33
|
| Induktivität (mH) |
0.9
|
| Trägheitsmoment (kg*m2*10-4) |
1.89
|
| Erlaubte radiale Kraft (N) |
245
|
| Erlaubte axiale Kraft (N) |
68
|
| Gewicht (kg) |
1.4
|
| Umgebungstemperatur bei Betrieb (°C) |
0 to 40
|
| Encoderauflösung (lines / Rev.) |
2500
|
| Isolationsklasse (thermische Klassifizierung) |
F
|
Motorstecker
Weibl. Gehäuse JST ELR-04NV mit männl. Pin SLM-41T-P1.3E;
Gegenstück = männl. Gehäuse JST ELP-04NV mit weibl. Pin SLF-41T-P1.3E
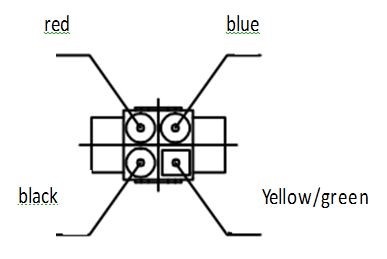
| Farbe | ||
| Motor Phase U | Rot | |
| Motor Phase V | Blau | |
| Motor Phase W | Schwarz | |
| Schirm / Motor Gehäuse | Gelb |
Encoderstecker (D-Sub 15, männlich):
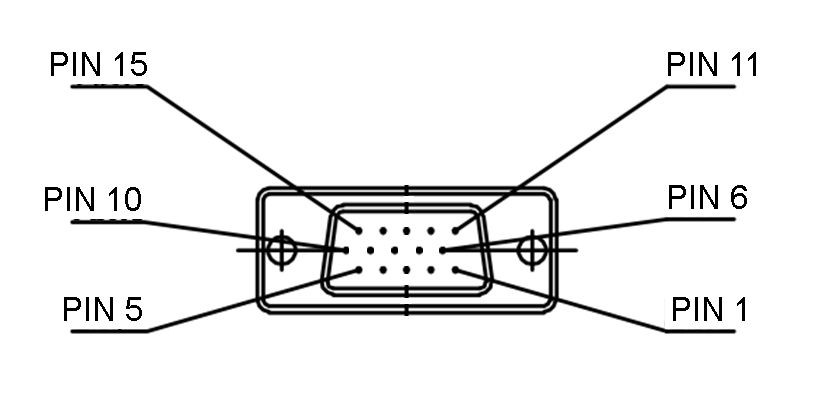
| Pin | Signal | Beschreibung |
| 1 | EA+ | Encoderkanal A+ |
| 2 | EB+ | Encodekanal B+ |
| 3 | EGND | Signal Masse |
| 4 | HallW+ | Hallsensor W+ |
| 5 | HallU+ | Hallsensor U+ |
| 6 | FG | Masse Abschirmung |
| 7 | EZ+ | Encoderkanal Z+ |
| 8 | EZ- | Encoderkanal Z- |
| 9 | HallV+ | Hallsensor V+ |
| 10 | HallV- | Hallsensor V- |
| 11 | EA- | Encoderkanall A- |
| 12 | EB- | Encoderkanal B- |
| 13 | VCC | +5V @ 100 mA max. |
| 14 | HallW- | Hallsensor W- |
| 15 | HallU- | Hallsensor U- |
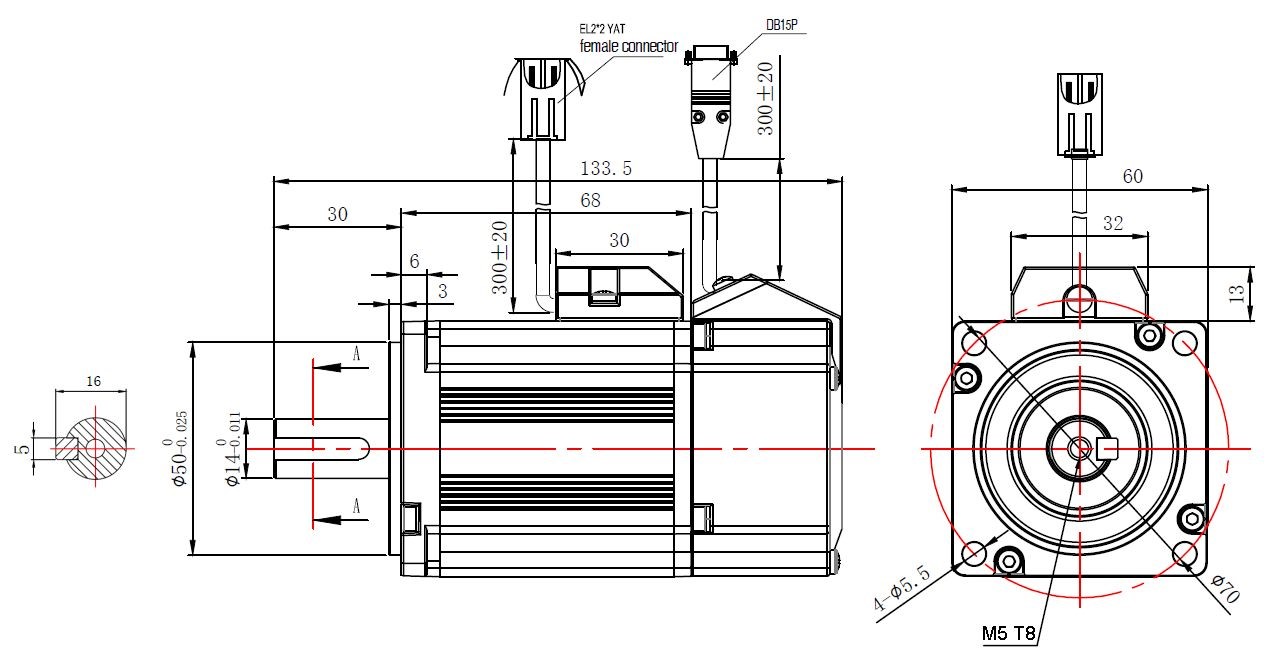
MECHANISCHE SPEZIFIKATION:
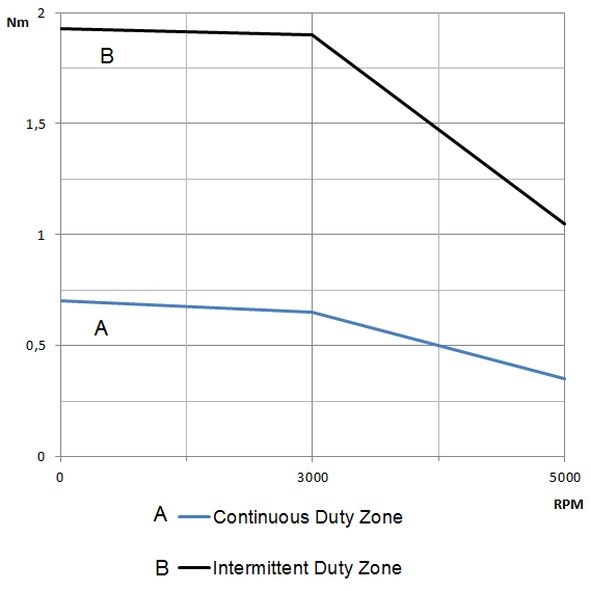
DREHMOMENTDIAGRAMM:
Deutsch
