Integrierte Schrittmotoren closed loop
iHSS42
 Datenblatt herunterladen
Datenblatt herunterladenDie iHSSXX Antriebe sind eine perfekte Zusammenführung von Schrittmotortreiber und Schrittmotor. Dieses Motorsystem integriert die Schrittmotor-Steuerungstechnik perfekt in den digitalen Schrittantrieb. Darüber hinaus verwendet dieses Produkt einen optischen Encoder mit Hochgeschwindigkeits-Positionsrückmeldung von 50 μs. Sobald eine Positionsabweichung registriert wird, wird sie sofort behoben. Dieses Produkt kombiniert die Vorteile des Schrittmotorantriebs mit denen des Servoantriebs, wie geringere Wärmeentwicklung, weniger Vibrationen, schnelle Beschleunigung und mehr.
- Kostengünstige Closed Loop Schrittmotorlösung
- Hohe Positionsgenauigkeit
- Keine Schrittverluste
- Ruhiger und gleichförmiger Motorlauf bei niedrigen Drehzahlen
- Kompakte Größe
- Eingangssignal: Puls / Richtung (PUL/DIR)
- Variable Stromkontrolltechnik, dadurch hohe Effizienz
- Parameter können via RS232 zum PC übertragen werden.
- Einstellungen über DIP-Schalter oder Software.
- Überstromschutz, Überspannungsschutz, Positionsabweichungsschutz
Die iHSSXX können in verschiedenen Anwendungen eingesetzt werden, wie z. B. Laserschneidmaschinen, Lasermarkierern, hochpräzisen XY-Tischen, Etikettier-Maschinen, CNC-Fräsmaschinen usw. Aufgrund der einzigartigen Eigenschaften sind die iHSSXX die ideale Wahl für Anwendungen, die sanften Motorlauf bei niedrigen Geschwindigkeiten und kleinen Einbauraum erfordern.
iHSS Schrittmotoren:
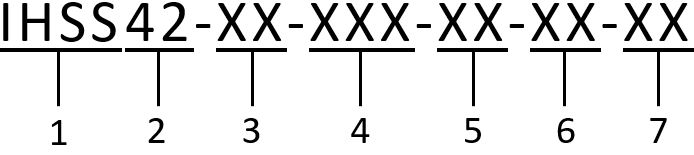
Integrierter Closed Loop Schrittmotor
- Integrierter Closed Loop Schrittmotor
- Motor Rahmengröße: 42 ≙ 42 mm
- Nennspannung: 24 ≙ 24 V
- Haltemoment: 05 ≙ 0,48 Nm / 07 ≙ 0,72 Nm
- Wellenlänge: keine Zahl ≙ 24 mm / 24 ≙ 24 mm
- Zentrierdurchmesser: keine Zahl ≙ 22 mm / 22 ≙ 22 mm
- Lochabstande: keine Zahl ≙ 31 mm / 31 ≙ 31 mm
| Parameter: | Min | Typisch | Max | Einheit |
|
Eingangsspannung |
24 |
24 |
50 |
VDC |
|
Ausgangsstrom |
- |
4,5 |
- |
A |
|
Pulse pro Umdrehung |
4 |
- |
51.200 |
- |
|
Eingangsfrequenz |
- |
- |
200 |
kHz |
|
Puls Spannung |
- |
5 |
24 |
V |
|
Steuersignalstrom |
5 |
10 |
16 |
mA |
|
Isolationswiderstand |
100 / 500 |
- |
- |
MΩ/V DC |
|
Isolationsklasse |
- |
B |
- |
- |
| Part Name: | iHSS42-24-05 | iHSS42-24-07 | Einheit | ||||
|
Strom pro Phase |
1,2 |
1,2 |
|
|
|
|
A |
|
Anzahl der Phasen |
2 |
2 |
|
|
|
|
- |
|
Haltemoment |
0,48 |
0,72 |
|
|
|
|
Nm |
|
Induktivität pro Phase |
7,9 |
10 |
|
|
|
|
mH±20% |
|
Widerstand pro Phase |
3 |
4 |
|
|
|
|
Ω ±10 % |
|
Trägheitsmoment |
77 |
110 |
|
|
|
|
g*cm2 |
|
Gewicht |
0,5 |
0,68 |
|
|
|
|
kg |
| Kühlung |
Natürliche Kühlung oder Zwangskühlung |
|
|
Arbeitsumgebung |
Umfeld |
Avoid dust, oil, fog and corrosive gases |
|
Umgebungstemperatur |
0 ℃ - 40 ℃ |
|
|
Luftfeuchtigkeit |
40 %RH - 90 %RH |
|
|
Arbeitstemperatur (Motorgehäuse) |
max. 90 °C |
|
| Lagertemperatur |
-20 ℃ bis 65 ℃ |
|
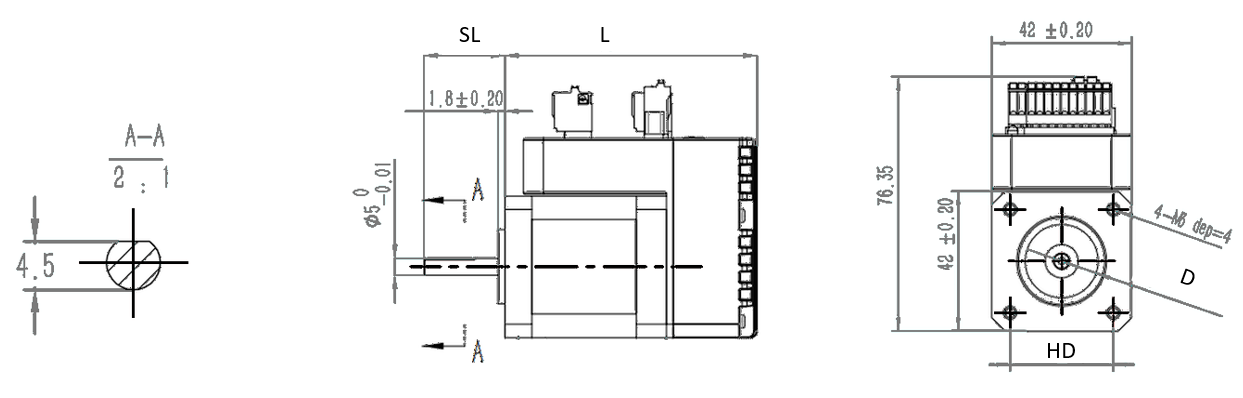
| Name | Länge Motor + Treiber L | Wellenlänge SL | Zentrierdurchmesser D | Lochabstand HD |
| iHSS42-24-05 | 76 ±1 mm | 24 ±1 mm | 22 mm | 31 mm |
| iHSS42-24-07 | 89 ±1 mm | 24 ±1 mm | 22 mm | 31 mm |
| - | - | - | - | - |
| - | - | - | - | - |
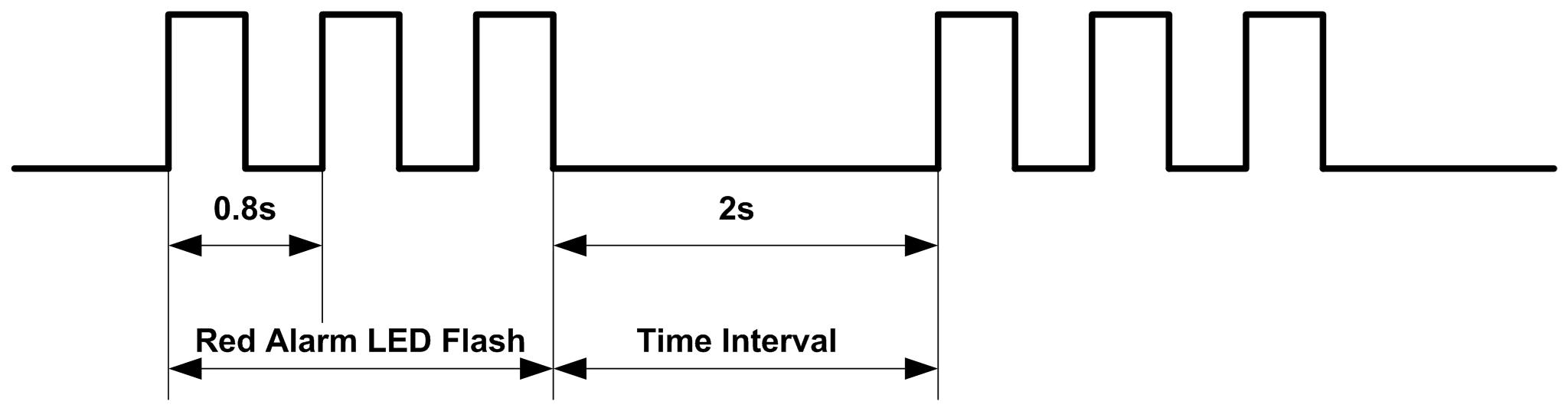
| LED blinkt | Beschreibung |
| 1 mal | Fehler tritt auf, wenn der Motorspulenstrom die Stromgrenze des Treibers überschreitet. |
| 2 mal | Voltage reference error in the drive |
| 3 mal | Parameters upload error in the drive |
| 4 mal | Eingangsspannung überschritten |
| 5 mal | Positionsfolgefehler hat den Grenzwert überschritten |
Die iHSSXX verfügen über drei Anschlüsse, einen für Stromanschluß, einen für Steuerungsanschlüsse und einen dritten für die RS232-Kommunikationsverbindung
|
Stromanschlußstecker
|
|||
| Pin | Name | I/O | Beschreibung |
| 1 | DC+ | I | Eingangsspannung + (Positiv) 24 V DC empfohlen, um Raum für Spannungsschwankungen und Rückströme (back-EMF) während der Verzögerung des Motors zu lassen |
| 2 | GND | GND | Eingangsspannung - (Negativ) |
|
Kontrollsignalanschuß |
|||
|
Pin |
Name |
I/O |
Beschreibung |
|
1 |
ALM- |
O |
Alarmsignal: OC Ausgangssignal aktiv, wenn eine der folgenden Fehlermeldungen aktiviert ist: Überspannungs-, Überstrom-, Kurzschlussschutz und Positionsfehler. Dieser Port kann maximal 8 mA bei 24V, bzw. max. 200 mW schalten. Der Widerstand zwischen ALM + und ALM- ist im Normalbetrieb hoch und wird bei Fehlermeldung niedrig. |
|
2 |
ALM+ |
O |
|
|
3 |
PED- |
O |
In-Position Signal: OC Ausgangssignal, aktiv wenn die aktuelle Motorposition die Ziel-Position erreicht hat. Dieser Port kann maximal 8 mA bei 24V, bzw. max. 200 mW schalten. Der Widerstand zwischen PED + und PED- ist im Normalbetrieb hoch und wird nach Erreichen der Endposition niedrig. |
|
4 |
PED+ |
O |
|
|
5 |
ENA- |
I |
Aktivierungs-Signal: Dieses Signal wird zur Aktivierung / Deaktivierung der Steuerung verwendet. Standardmäßig bedeutet hoher Pegel Freigabe, und niedriger Pegel Deaktivierung der Steuerung (bei Verwendung von NPN-Logik). Normalerweise nicht angeschlossen (=aktivierte Steuerung). Bitte beachten Sie, daß das Signal bei Verwendung von PNP-Logik und Differenz-Ausgangssignal gegensätzlich arbeitet, nämlich niedriger Pegel für „aktiviert“. . |
|
6 |
ENA+ |
I |
|
|
7 |
DIR- |
I |
Richtungs-Signal (Direction): Im Puls-Richtungs-Modus ist dieser Eingang für die low / high Spannungsebenen, die zwei Richtungen des Motors. Für eine zuverlässige Reaktion sollte das DIR Signal mindestens 5 µs vor dem PUL Signal anliegen, Spannungen: 3,5 bis 24 V für DIR-HIGH, 0 - 0,5 V für DIR-LOW. Die Drehrichtung des Motors kann auch mit DIP-Schalter S6 umgeschaltet werden. |
|
8 |
DIR+ |
I |
|
|
9 |
PUL- |
I |
Pulssignal: Im Puls-Richtungs-Modus ist dieser Eingang für das Eingangspulssignal, jeweils steigende oder fallende Flanke aktiv (über Software konfigurierbar); Spannungen: 3,5 bis 24 V, wenn PUL-HIGH, 0 - 0,5 V, wenn PUL-LOW. Für einen zuverlässigen Betrieb sollte die Impulsbreite bei 200 kHz länger als 2,5 µs sein. |
|
10 |
PUL+ |
I |
|
|
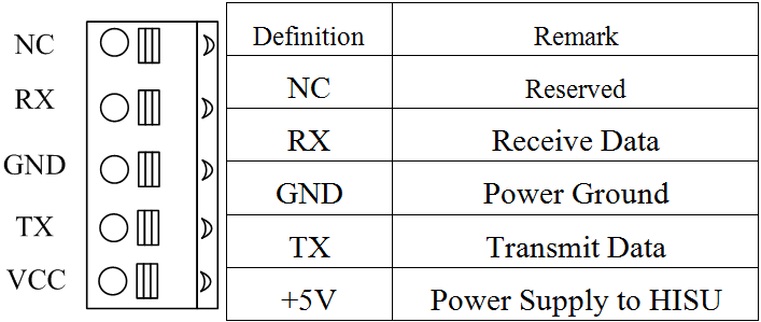
RS232 Kommunikationsanschluß
|
||||
| Pin | Name | Farben beim beigen runden Kabel | Farben beim grauen flachen Kabel | Beschreibung |
| 1 | NC | - | - | Nicht belegt |
| 2 | RX | Braun- Weiß | Gelb | RS2 RS232 Dateneingang |
| 3 | GND | Blau | Grün | Masse |
| 4 | TX | Blue-Weiß | Red | RS232 Transmit data |
| 5 | VCC | - | - | +3,3 V Ausgang (Achtung: Nicht anschließen bei Verbindung zu einem seriellen Port eines PCs!) |
Hinweis 1: : Der RS232-Kommunikationsanschluss ist nicht isoliert. Bitte verwenden Sie ein galvanisch getrenntes Netzteil für den iHSS86, wenn der serielle Port des PCs nicht isoliert ist.
Hinweis 2: Stecken oder ziehen Sie den Stecker nicht bei eingeschaltetem Gerät.
Pulse pro Umdrehung (SW1-SW4)
Die Pulse pro Umdrehung können über die DIP-Schalter S1 - S4 oder die Software konfiguriert werden. Wenn sich alle S1 - S4 in der Position "ON" befinden, nimmt der Treiber die von der Software eingestellte Einstellung der vor. In diesem Fall kann ein Benutzer über die Software auf einen durch 50 teilbaren Wert zwischen 200 und 50000 Pulsen neu konfigurieren. Wenn nur ein Schalter von SW1 - SW4 in der "AUS" -Position ist, wird die Einstellung über die DIP-Schalter bestimmt. Verwenden Sie folgende Tabelle für die Einstellung:
|
Pulse / Umdrehung
|
SW1
|
SW2
|
SW3
|
SW4
|
|
Software abhängig
|
On
|
On
|
On
|
On
|
|
800 |
Off |
On |
On |
On |
|
1600 |
On |
Off |
On |
On |
|
3200 |
Off |
Off |
On |
On |
|
6400 |
On |
On |
Off |
On |
|
12800 |
Off |
On |
Off |
On |
|
25600 |
On |
Off |
Off |
On |
|
51200 |
Off |
Off |
Off |
On |
|
1000 |
On |
On |
On |
Off |
|
2000 |
Off |
On |
On |
Off |
|
4000 |
On |
Off |
On |
Off |
|
5000 |
Off |
Off |
On |
Off |
|
8000 |
On |
On |
Off |
Off |
|
10000 |
Off |
On |
Off |
Off |
|
20000 |
On |
Off |
Off |
Off |
|
40000 |
Off |
Off |
Off |
Off |
SW 5: dient zur Festlegung der Aktivierungsflanke des Eingangssignals, "off" bedeutet, dass die Aktivierungsflanke die steigende Flanke ist, während "on" die fallende Flanke ist..
SW 6: wird für die Einstellung der Drehrichtung verwendet. “Off” bedeutet CCW, während “On” CW bedeutet.
SW 7: wird für die PUL Filtereinstellung verwendet, “Off” bedeutet Max. PUL-Frequenz ist 200 kHz, “On” bedeutet Max. PUL-Frequenz ist 100 kHz. Hinweis: Wenn der P22 Parameter 0 ist, wird der Wert der Einstellung des Pulsfilters von SW 7 bestimmt. Falls der Wert über 0 liegt hat SW 7 keine Funktion.
SW 8: wird für die PUL Glättungseinstellung verwendet, “Off” bedeutet PUL-Glättung ausgeschaltet, “On” bedeutet PUL-Glättung aktiv.
Bereits ab Werk sind Standard-Parameter gesetzt. Diese Standardparameterwerte sind optimiert und für die meisten industriellen Anwendungen passend. In den meisten Fällen ist es nicht notwendig sie zu ändern. Wenn Sie jedoch die Leistung für Ihren Einsatz optimieren möchten, kann die Software verwendet werden, mit der diese Parameter justiert werden können.
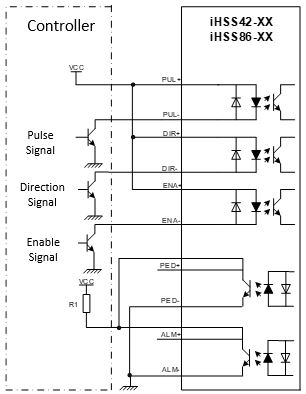
Anschluss unter Verwendung von NPN-Logik
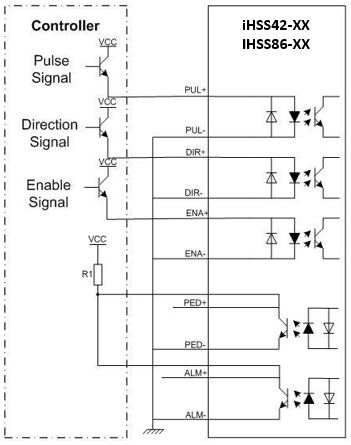
Anschluss unter Verwendung von PNP-Logik
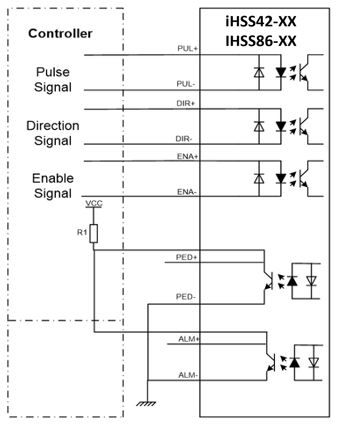
Anschluss unter Verwendung eines Differenz-Ausgangssignals
R1: abhängig von VCC zu wählen; Empfehlung zwischen 3 - 5 kΩ, da die OC Ports max. 200 mW schalten.
Hinweis 1: Der RS232-Kommunikationsanschluss ist nicht isoliert. Bitte verwenden Sie ein galvanisch getrenntes Netzteil für den iHSV57-XX, wenn der serielle Port des PCs nicht isoliert ist.
Hinweis 2: Stecken oder ziehen Sie den Stecker nicht bei eingeschaltetem Gerät.