Schrittmotor-Steuerung
Leadshine M542 V2.0
Analogtechnik, max. 50V/4.2A
 Datenblatt herunterladen
Benutzerhandbuch (englisch) herunterladen
Datenblatt herunterladen
Benutzerhandbuch (englisch) herunterladen
Die M542 V2.0 ist ein Hochleistungs-Mikroschritt-Treiber mit Steuerungstechnik basierend auf sinusförmigem Steuerstrom. Aufgrund dieser Technologie und der selbst einstellenden Stromregelung in Abhängigkeit vom Einsatz verschiedener Motoren kann der angetriebene Motor geräuschärmer mit geringerer Erwärmung, gleichmäßiger Bewegung bei besseren Leistungsdaten und bei dennoch höherer Geschwindigkeit als mit den meisten vergleichbaren anderen Steuerungen betrieben werden. Er ist für 2-Phasen- und 4-Phasen-Hybrid-Schrittmotoren geeignet.
- Hohe Leistung, kostengünstig
- Versorgungsspannung bis +50VDC
- Ausgangsstrom bis 4.2A
- Ausgangsstrom mittels DIP-Schalter in acht Schritten wählbar
- Automatische Stromabsenkung (im Ruhebetrieb) zur Reduktion der Motorwärme; Funktion abschaltbar
- selbst einstellende Stromregelung abhängig von Motordaten
- sinusförmige Stromregelung
- Eingangsfrequenz bis 300 kHz
- Eingänge TTL kompatibel und optisch isoliert
- 15 wählbare Auflösungen (dezimal und binär), bis zu 25.600 Schritte/Umdrehung
- Für 2-Phasen- und 4-Phasen-Motoren geeignet
- Unterstützt PUL/DIR- und CW/CCW-Betriebsarten
- Unter-, Überspannungsschutz, Überstromschutz
| Kenndaten | Min | Typ. | Max | Einheit |
| Ausgangsstrom | 1.0 | - | 4.2 (3.0 eff.) | A |
| Versorgungsspannung | +20 | +36 | +50 | VDC |
| Logische Signalpegel | 7 | 10 | 16 | mA |
| Eingangsfrequenz | 0 | - | 300 | kHz |
| Isolationswiderstand | 500 | MO |
| Kenndaten | Min | Typ. | Max |
| Mikroschritte/1.8° | 400 | 25.600 | |
| PUL/PUL CW | X | ||
| Doppelpuls CCW | Optional | ||
| NEMA Größe | 17 | 34 | |
| Motortyp Mecheltron | 42BYGH-XXXX | 86BYGH-XXXX |
Geeignet für eine breite Palette von Schrittmotoren von NEMA-Größe 17, 23, 24 und 34 (42x42 mm bis 86x86 mm). Er kann für verschiedene Maschinentypen mit XY-Achsen wie Etikettiermaschinen, Graviermaschinen Laserschneidanlagen, Bestückungsautomaten usw. verwendet werden. Besonders wo geringe Geräusche, niedrige Erwärmung, hohe Geschwindigkeit und hohe Genauigkeit erwünscht sind.
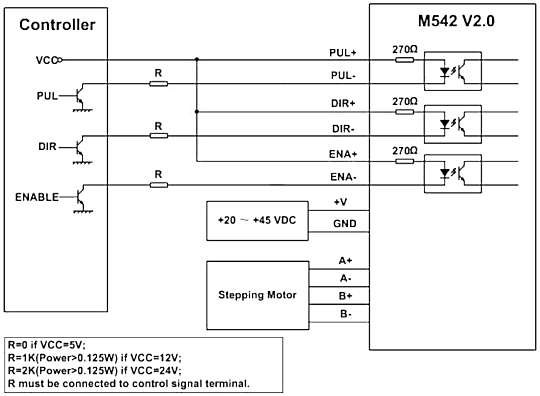
Ein komplettes System besteht aus Schrittmotor, Schrittmotor-Treiber, Stromversorgung und Controller (Impulsgeber). Ein typisches Anschlussbild wird in der nachfolgenden Abbildung gezeigt: