Integrierte AC Servo Motoren
iHSV60
 Datenblatt herunterladen
Datenblatt herunterladen Parametriersoftware herunterladen
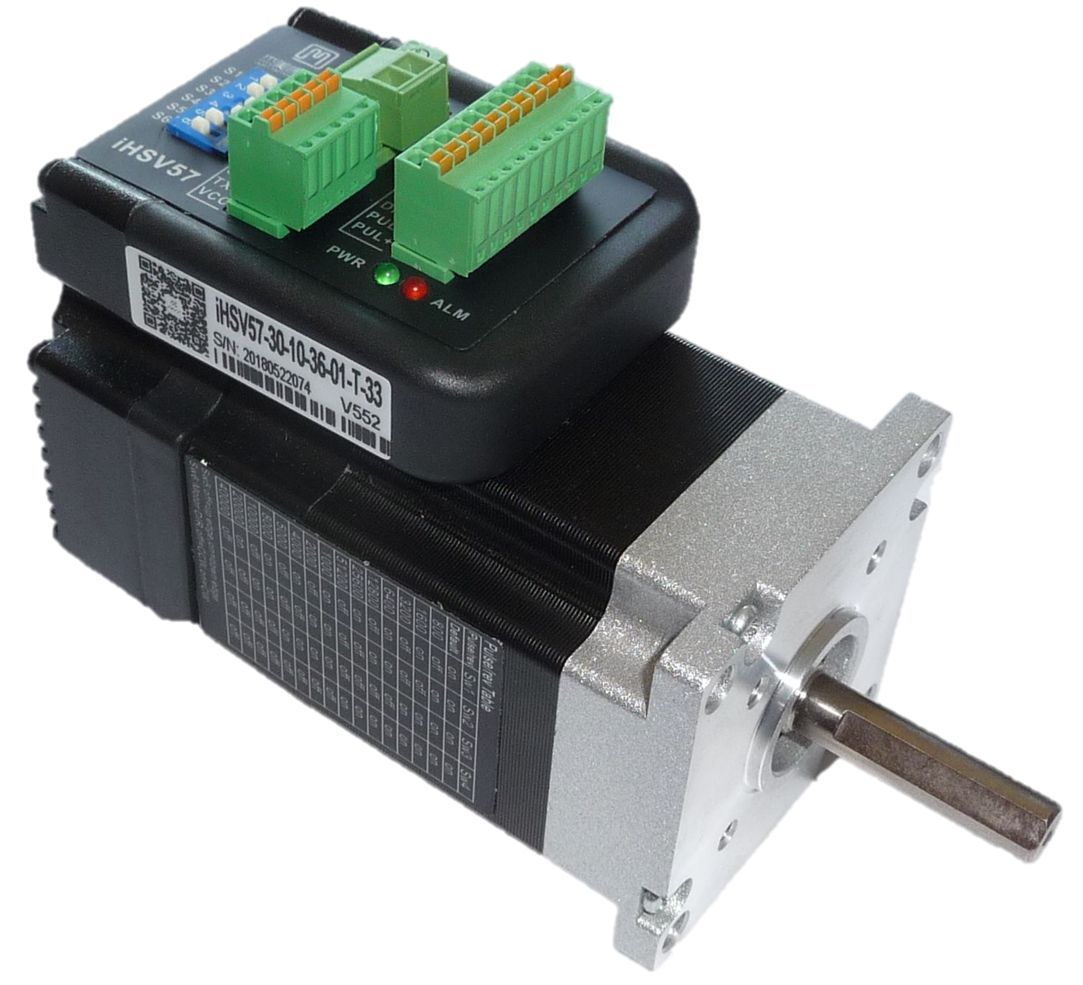
Parametriersoftware herunterladenDer iHSV60-XX AC Servos besteht aus einem perfekt abgestimmtem Servotreiber integriert in einen Servomotor, vektorgesteuert und mit DSP Chip. Das System spart Bauraum, Verkabelung zwischen Treiber, Motor und Encoder, und ist durch seinen niedrigen Anschaffungspreis sehr rentabel.
- Hohe Positionsgenauigkeit
- Keine Schrittverluste
- Kostengünstige Servomotorlösung
- Ruhiger und gleichförmiger Motorlauf
- Kompakte Größe
- Eingangssignal: Puls / Richtung (PUL/DIR)
- Bandbreite Current Loop:(-3dB)2KHz (Typisch)
- Bandbreite Speed Loop: 500Hz (Typisch)
- Bandbreite Position Loop: 200Hz (Typisch)
- Parameter können via RS232 zum PC übertragen werden.
- Einstellungen über DIP-Schalter oder Software.
- Überstromschutz, I2T-Motorstromüberwachung, Über- und Unterspannungsschutz, Überhitzungsschutz, Überdrehzahlschutz.
Die iHSV60-XX können in verschiedenen Anwendungen eingesetzt werden, wie z. B. Laserschneidmaschinen, Lasermarkierern, hochpräzisen XY-Tischen, Etikettiermaschinen, CNC-Fräsmaschinen usw. Aufgrund der einzigartigen Eigenschaften sind die iHSV60-XX die ideale Wahl für Anwendungen, die sanften Motorlauf bei niedrigen Geschwindigkeiten, hohes Drehmoment auch bei höheren Drehzahlen und kleinen Einbauraum erfordern.
iHSV Servos:
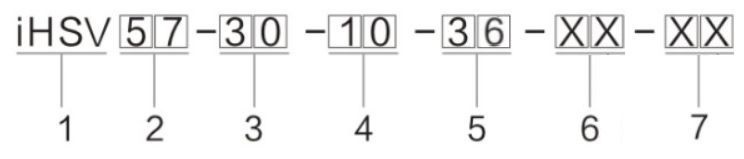
- 1.Integrierter Servomotor
- 2 Motor Rahmengröße: 57 mm
- 3.Motordrehzahl (Einheit: x 100 min-1) 10 ≙ 1000 min-1, 20 ≙ 2000 min-1, 30 ≙ 3000 min-1
- 4.Ausgangsleistung (Einheit: x 10 W) 10 ≙ 100 W; 20 ≙ 200 W
- 5.Nennspannung: 24 ≙ 24 V, 36 ≙ 36 V.
- 6.Wellenlänge: keine Zahl =30, 20 ≙ 20 mm
- 7.Zentrierdurchmesser: keine Zahl = 50 mm, 38 = 38.1 mm
| Parameter: | Min | Typisch | Max | Einheit |
|
Eingangsspannung |
24 |
48 |
60 |
VDC |
|
Ausgangsstrom |
6 |
A |
||
|
Pulse pro Umdrehung |
4 |
- |
51200 |
- |
|
Eingangsfrequenz |
- |
200 |
kHz |
|
|
Puls Spannung |
3.3 |
5 |
24 (with R 3 - 5 kΩ) |
V |
|
Steuersignalstrom |
7 |
10 |
16 |
mA |
|
Isolationswiderstand |
100 |
- |
- |
MΩ |
|
Name: |
iHSV60-30- 40-48-XX |
Einheit |
||
|
Nennleistung |
400 |
|
|
W |
|
Nenndrehmoment |
1.27 |
|
|
Nm |
|
Nenndrehzahl |
3000 |
|
|
min-1 |
|
Maximaldrehzahl |
4200 |
|
|
min-1 |
|
Nennspannung |
36 |
|
|
V |
|
Gewicht |
1.0 |
|
|
kg |
| Kühlung |
Natürliche Kühlung oder Zwangskühlung |
|
|
Arbeitsumgebung |
Umfeld |
Öl, Staub und korrosive Gase vermeiden |
|
Umgebungstemperatur |
0 ℃ - 40 ℃ |
|
|
Luftfeuchtigkeit |
40 %RH - 90 %RH |
|
|
Arbeitstemperatur (Motorgehäuse) |
max. 70 °C |
|
| Lagertemperatur |
-20 ℃ - 80 ℃ |
|
|
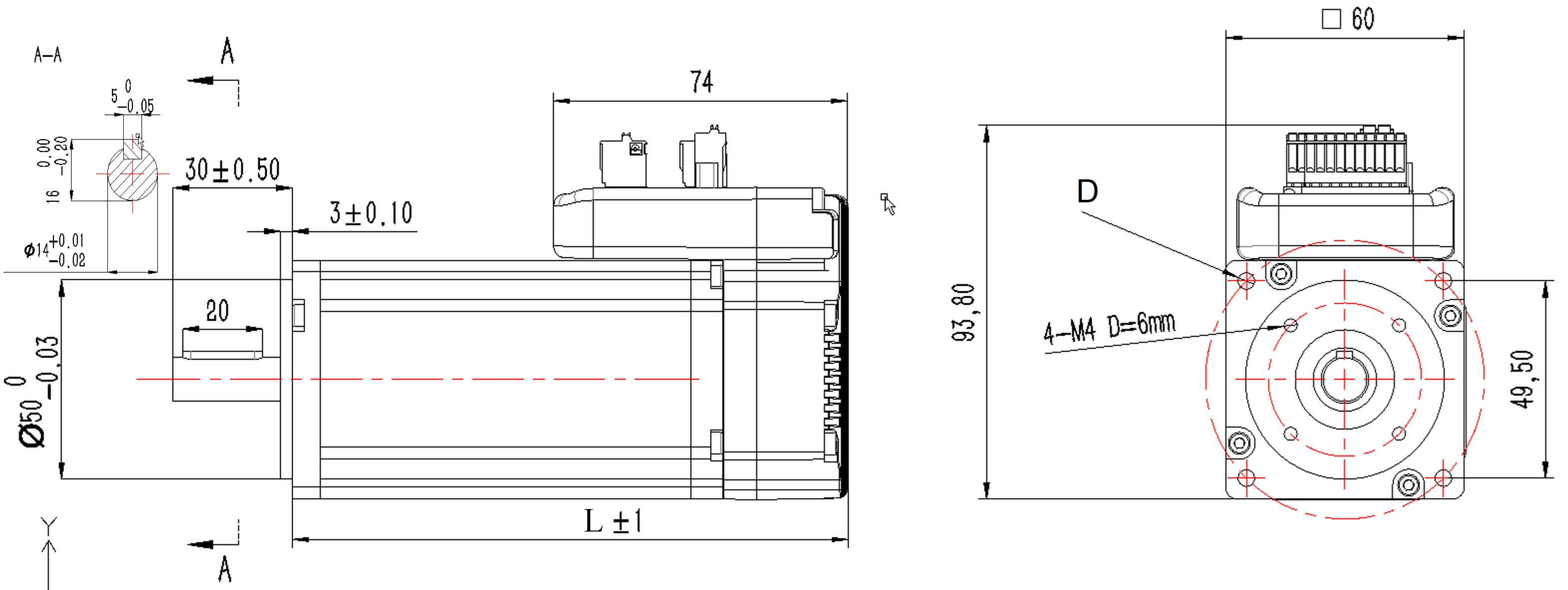
Name: |
Motorlänge |
Gesamtlänge (L) |
Wellenlänge |
Zentrier Ø |
Bohr Ø (D) |
|
iHSV60-30-40-48-30-50 |
108 mm |
140 mm |
30 ± 1mm |
50 mm |
Gewinde M5 |
|
iHSV60-30-40-48-5.5 |
108 mm |
140 mm |
30 ± 1mm |
50 mm |
5.5 mm |
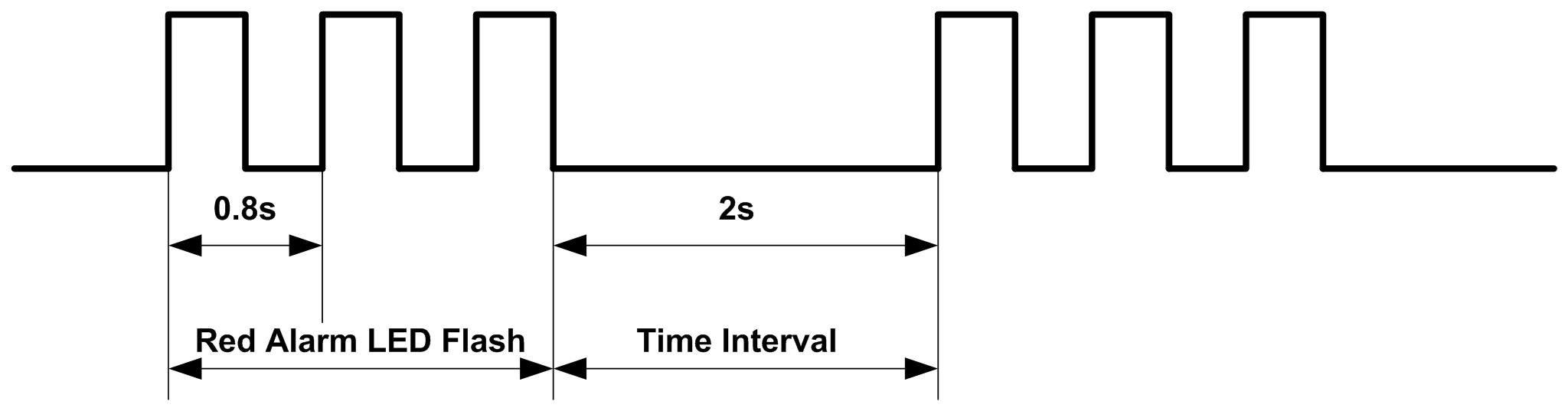
| LED leuchtet | Beschreibung |
| 2 mal | Überstrom |
| 3 mal | Positionsabweichung überschreitet den gesetzten Wert |
| 4 mal | Encoderalarm |
| 7 mal | Überlast |
Die iHSV60-XX verfügen über drei Anschlüsse, einen für Stromanschluß, einen für Steuerungsanschlüsse und einen dritten für die RS232-Kommunikationsverbindung
|
Stromanschlußstecker
|
|||
| Pin | Name | I/O | Beschreibung |
| 1 | DC+ | I | Eingangsspannung + (Positiv) 20 – 36 V DC empfohlen, um Raum für Spannungsschwankungen und Rückströme (back-EMF) während der Verzögerung des Motors zu lassen |
| 2 | GND | GND | Eingangsspannung - (Negativ) |
|
Kontrollsignalanschuß |
|||
|
Pin |
Name |
I/O |
Beschreibung |
|
1 |
ALM- |
O |
Alarm Signal: : OC Ausgangssignal aktiv, wenn eine der folgenden Fehlermeldungen aktiviert ist: Überspannungs-, Überstrom-, Kurzschlussschutz und Positionsfehler. Dieser Port kann maximal 8 mA bei 24V, bzw. max. 200 mW schalten. Der Widerstand zwischen ALM + und ALM- ist im Normalbetrieb hoch und wird bei Fehlermeldung niedrig. |
|
2 |
ALM+ |
O |
|
|
3 |
PED- |
O |
In-position Signal: OC Ausgangssignal, aktiv wenn die aktuelle Motorposition die Ziel-Position erreicht hat. Dieser Port kann maximal 8 mA bei 24V, bzw. max. 200 mW schalten. Der Widerstand zwischen PED + und PED- ist im Normalbetrieb hoch und wird nach Erreichen der Endposition niedrig. |
|
4 |
PED+ |
O |
|
|
5 |
ENA- |
I |
Aktivierungs-Signal: : Dieses Signal wird zur Aktivierung / Deaktivierung der Steuerung verwendet. Standardmäßig bedeutet hoher Pegel Freigabe, und niedriger Pegel Deaktivierung der Steuerung (bei Verwendung von NPN-Logik). Normalerweise nicht angeschlossen (=aktivierte Steuerung). Bitte beachten Sie, daß das Signal bei Verwendung von PNP-Logik und Differenz-Ausgangssignal gegensätzlich arbeitet, nämlich niedriger Pegel für „aktiviert“. |
|
6 |
ENA+ |
I |
|
|
7 |
DIR- |
I |
Richtungs-Signal (Direction): Im Puls-Richtungs-Modus ist dieser Eingang für die low / high Spannungsebenen, die zwei Richtungen des Motors. Für eine zuverlässige Reaktion sollte das DIR Signal mindestens 5 µs vor dem PUL Signal anliegen, Spannungen: 4,5 bis-24 V für DIR-HIGH, 0 - 0.5 V für DIR-LOW. Die Drehrichtung des Motors kann auch mit DIP-Schalter S6 umgeschaltet werden. |
|
8 |
DIR+ |
I |
|
|
9 |
PUL- |
I |
Pulse Signal: Im Puls-Richtungs-Modus ist dieser Eingang für das Eingangspulssignal, jeweils steigende oder fallende Flanke aktiv (über Software konfigurierbar); Spannungen: 4,5 bis 24 V, wenn PUL-HIGH, 0-0.5V, wenn PUL-LOW. Für einen zuverlässigen Betrieb sollte die Impulsbreite bei 200 kHz länger als 2,5 µs sein. |
|
10 |
PUL+ |
I |
|
|
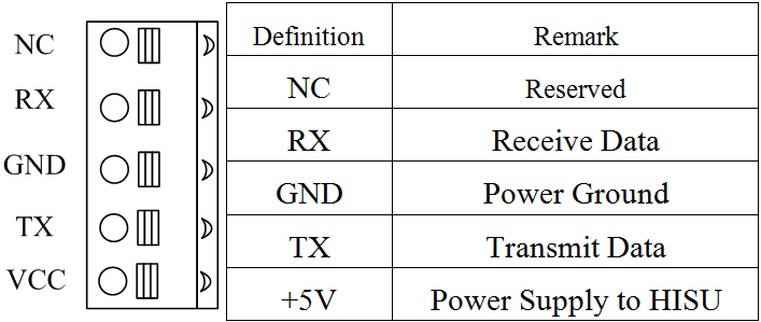
RS232 Kommunikationsanschluß
|
||||
| Pin | Name | Farben beim beigen runden Kabel | Farben beim grauen flachen Kabel | Beschreibung |
| 1 | NC | - | - | Nicht belegt |
| 2 | RX | Braun- Weiß | Gelb | RS2 RS232 Dateneingang |
| 3 | GND | Blau | Grün | Masse |
| 4 | TX | Blue-Weiß | Rot | RS232 Datenausgang |
| 5 | VCC | - | - | +3,3 V Ausgang (Achtung: Nicht anschließen bei Verbindung zu einem seriellen Port eines PCs!) |
Hinweis1: Der RS232-Kommunikationsanschluss ist nicht isoliert. Bitte verwenden Sie ein galvanisch getrenntes Netzteil für den iHSV60-XX, wenn der serielle Port des PCs nicht isoliert ist.
Hinweis2: Stecken oder ziehen Sie den Stecker nicht bei eingeschaltetem Gerät.
Pulse pro Umdrehung (S1-S4)
Die Pulse pro Umdrehung können über die DIP-Schalter S1 - S4 oder die Software konfiguriert werden. Wenn sich alle S1 - S4 in der Position "ON" befinden, nimmt der Treiber die von der Software eingestellte Einstellung der vor (standardmäßig 4000 Pulse bei Einstellung 1:1). In diesem Fall kann ein Benutzer über die Software auf einen beliebigen Wert zwischen 4 und 51200 Pulsen neu konfigurieren. Wenn irgendein Schalter von S1 - S4 in der "AUS" -Position ist, wird die Einstellung über die DIP-Schalter bestimmt. Verwenden Sie folgende Tabelle für die Einstellung. .
|
Pulse / Umdrehung
|
SW1
|
SW2
|
SW3
|
SW4
|
|
Software abhängig (voreingestellt 4000 bei Einst. Electronic Gear 1:1)
|
On
|
On
|
On
|
On
|
|
800 |
Off |
On |
On |
On |
|
1600 |
On |
Off |
On |
On |
|
3200 |
Off |
Off |
On |
On |
|
6400 |
On |
On |
Off |
On |
|
12800 |
Off |
On |
Off |
On |
|
25600 |
On |
Off |
Off |
On |
|
51200 |
Off |
Off |
Off |
On |
|
1000 |
On |
On |
On |
Off |
|
2000 |
Off |
On |
On |
Off |
|
4000 |
On |
Off |
On |
Off |
|
5000 |
Off |
Off |
On |
Off |
|
8000 |
On |
On |
Off |
Off |
|
10000 |
Off |
On |
Off |
Off |
|
20000 |
On |
Off |
Off |
Off |
|
40000 |
Off |
Off |
Off |
Off |
Spannungsflanke steigend oder abfallend (SW5)
Mit SW 5 kann die steigende oder abfallende Flanke des Eingangssignals eingestellt werden. Off heißt steigend, on heißt abfallend.
Motor-Drehrichtung (SW6)
Der DIP-Schalter SW 6 wird verwendet, um die Drehrichtung der Motorwelle zu ändern. Wenn Sie die Position von "EIN" auf "AUS" oder "AUS" auf "EIN" ändern, wird die Drehrichtung umgekehrt.
Bereits ab Werk sind Standard-Parameter gesetzt. Diese Standardparameterwerte sind optimiert. Sie sollten für die meisten industriellen Anwendungen gut genug sein, und es ist normalerweise nicht notwendig, sie zu ändern. Wenn Sie jedoch für beste Leistung für Ihre Anwendungen optimieren möchten, kann die Software verwendet werden, mit der Sie diese Parameter einstellen können.
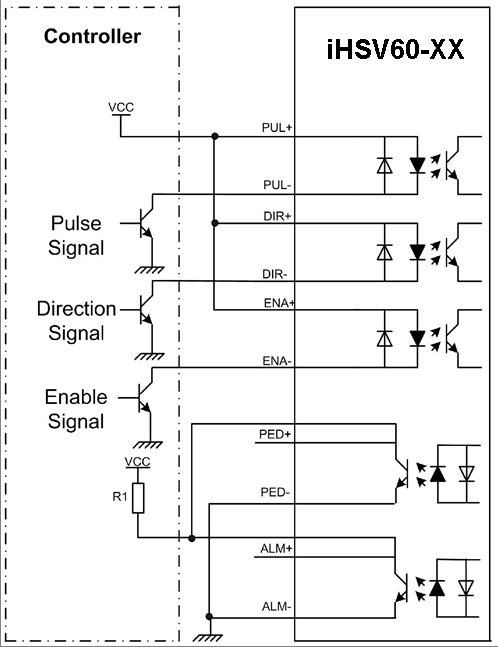
Anschluss unter Verwendung von NPN-Logik
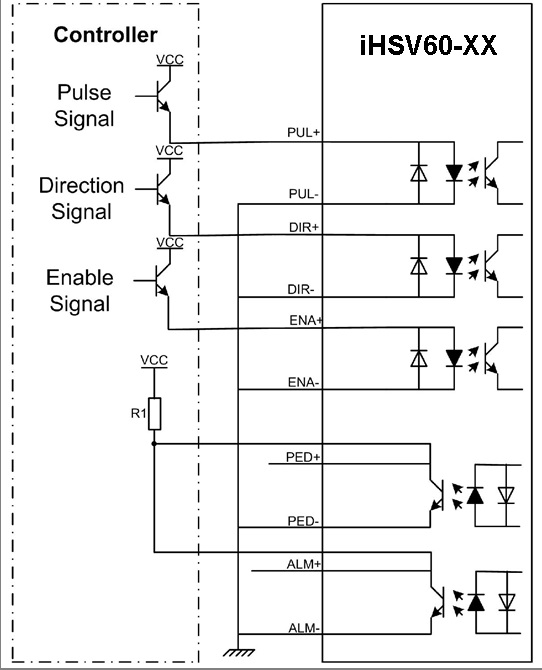
Anschluss unter Verwendung von PNP-Logik
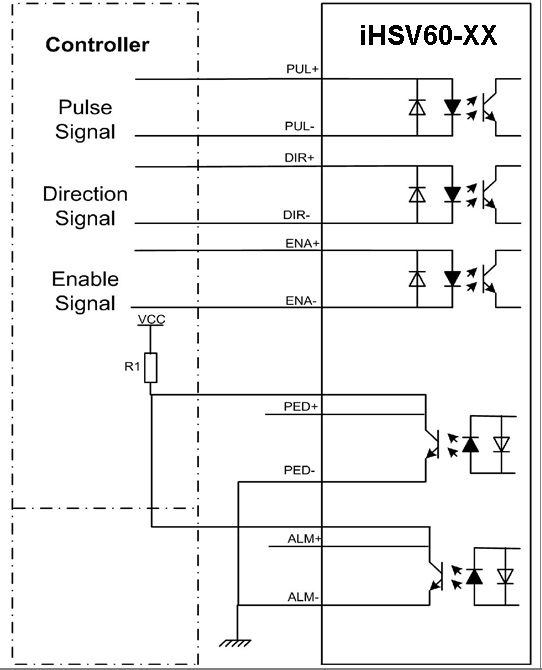
Anschluss unter Verwendung eines Differenz-Ausgangssignals
Hinweis1: Der RS232-Kommunikationsanschluss ist nicht isoliert. Bitte verwenden Sie ein galvanisch getrenntes Netzteil für den iHSV60-XX, wenn der serielle Port des PCs nicht isoliert ist.
Hinweis2: Stecken oder ziehen Sie den Stecker nicht bei eingeschaltetem Gerät.