
Hybrid Servo Driver
Leadshine ES-D808
 Datenblatt herunterladen
Datenblatt herunterladen ProTuner ES-D Software herunterladen Anschlussbeschreibung (englisch) herunterladen Softwarehandbuch (englisch) herunterladen RS232 pin layout herunterladen
ProTuner ES-D Software herunterladen Anschlussbeschreibung (englisch) herunterladen Softwarehandbuch (englisch) herunterladen RS232 pin layout herunterladen
PRODUKTBESCHREIBUNG:
Die ES-Serie ist eine kostengünstige Alternative für Anwendungen, bei denen bisher wegen des hohen Anspruchs an Leistung und Zuverlässigkeit der Servo die einzige Wahl war. Das System beinhaltet einen 2-Phasen-Schrittmotor mit einer vollständig digitalen Hochleistungs-Steuerung und einem internen Encoder. Es werden in Echtzeit Position, Geschwindigkeit und Strom in einem Regelkreis überwacht, genau wie bei Servo-Systemen. Easy Servos kombinieren die Vorteile der Servo- und Schrittmotor-Technologien. Sie liefern einzigartige Eigenschaften und Verbesserungen im Vergleich zu diesen herkömmlichen Systemen bei geringeren Kosten als bei Servo-Systemen.
PRODUKTMERKMALE:
- Closed-loop, eliminiert Schrittverluste
- Breiterer Einsatzbereich – höheres Drehmoment und höhere Drehzahlen
- Reduzierte Wärmeentwicklung und höhere Effizienz
- Weicher Lauf und sehr leises Laufgeräusch
- deutlich geringere Drehmomentreserve bei der Auslegung nötig als bei herkömmlichen Schrittmotoren
- Kein Einstellen und immer stabil
- Sehr geringe Reaktionszeit
- Hohes Drehmoment beim Start und niedriger Drehzahl, hohe Steifigkeit beim Stillstand
- Niedrige Kosten
Elektrische Spezifikation :
|
Parameter
|
Min | Typisch |
Max
|
Einheit |
|
Ausgangsstrom
|
0.5
|
-
|
8.2 (Peak)
|
A
|
|
Eingangsspannung
|
24
|
48
|
80
|
VDC
|
|
Steuerstrom
|
7
|
10
|
16
|
mA
|
|
Puls-Eingangsfrequenz
|
0
|
-
|
200
|
kHz
|
|
Isolationswiderstand
|
500
|
MΩ
|
||
|
Mikroschrittauflösung
|
200
|
51200
|
Schritte / Umdr.
|
STECKERKONFIGURATION
|
Die ES-D808 hat vier Anschlüsse, je einen zum Anschluß der Kontrollsignale, für die Statussignale, für den Encoder und für Motoranschluß und Eingangsspannung.
|
|||
|
Pin
|
Name
|
I/O
|
Description
|
|
1
|
PUL+
|
I
|
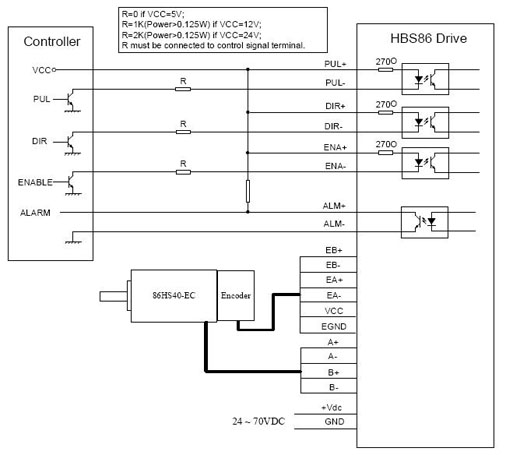
Pulssignal: Im Puls-Richtungs-Modus ist dieser Eingang für das Eingangspulssignal, jeweils steigende oder fallende Flanke aktiv (über Software konfigurierbar, siehe Hybrid Servo Software Betriebshandbuch für weitere Einzelheiten); Im Doppel-Puls-Modus (Software konfigurierbar), ist dieser Eingang für den Puls im Uhrzeigersinn (CW), aktiv auf hohem sowohl auch auf niedrigem Niveau. Spannungen: 4-5V, wenn PUL-HIGH, 0-0.5V, wenn PUL-LOW. Für einen zuverlässigen Betrieb sollte die Impulsbreite länger als 2,5 µs sein. Bei +12 V oder +24 V zur Strombegrenzung Widerstände seriell schalten. Das gleiche gilt für das DIR und ENA-Signal.
|
|
2
|
PUL-
|
I
|
|
|
3
|
DIR+
|
I
|
Richtungs-Signal (Direction): Im Puls-Richtungs-Modus ist dieser Eingang für die low / high Spannungsebenen, die zwei Richtungen des Motors. In Doppel-Puls-Modus (Software konfigurierbar), ist dieser Eingang für den Puls gegen den Uhrzeigersinn (CCW), aktiv auf hohem sowohl auch auf niedrigem Niveau. Für eine zuverlässige Reaktion sollte das DIR Signal mindestens 5 µs vor dem PUL Signal anliegen, Spannungen: 4-5 V für DIR-HIGH, 0-0.5 V für DIR-LOW. Bitte beachten Sie, dass die Drehrichtung auch von der Verdrahtung von Motor und Steuerung abhängig ist. Das Wechseln der zwei Leitungen einer Motorspule an der Steuerung bewirkt Umkehr der Drehrichtung. Die Polarität des Richtungssignals ist per Software konfigurierbar.
|
|
4
|
DIR-
|
I
|
|
|
5
|
ENA+
|
I
|
Aktivierungs-Signal: Dieses Signal wird zur Aktivierung / Deaktivierung der Steuerung verwendet. Standardmäßig bedeutet hohes Niveau Freigabe, und niedriges Niveau Deaktivierung der Steuerung (bei Verwendung von NPN-Logik). Normalerweise nicht angeschlossen (=aktivierte Steuerung). Bitte beachten Sie, daß das Signal bei Verwendung von PNP-Logik und Differenz-Ausgangssignal gegensätzlich arbeitet, nämlich niedriges Niveau für „aktiviert“. Der aktive Pegel des ENA-Signals ist per Software konfigurierbar.
|
|
6
|
ENA-
|
I
|
|
|
Status-Signalanschluß – Schraubanschluß
|
|||
|
Pin
|
Name
|
I/O
|
Beschreibung
|
|
1
|
INP+
|
O
|
In-position signal: OC Ausgangssignal, aktiv wenn die Differenz zwischen aktueller Position und der programmierten Position Null ist. Dieser Port kann maximal 20mA bei 24V schalten. Der Widerstand zwischen INP+ und INP- ist bei Aktivität hoch.
|
|
2
|
INP-
|
O
|
|
|
3
|
ALM+
|
O
|
Alarm signal: OC Ausgangssignal aktiv, wenn eine der folgenden Fehlermeldungen aktiviert ist: Überspannungs-, Überstrom-, Kurzschlussschutz und Positionsfehler. Dieser Port kann maximal 20mA bei 24V schalten. Der Widerstand zwischen ALM + und ALM- ist im Normalbetrieb niedrig und wird bei Fehlermeldung hoch. Die aktive Ebene des Alarmsignals ist per Software konfigurierbar. Für mehr Details siehe Softwareanleitung.
|
|
5
|
ALM-
|
O
|
|
|
Encoder Anschluß – Schraubanschluß
|
|||
|
Pin
|
Name
|
I/O
|
Beschreibung
|
|
1
|
EB+
|
I
|
Encoder Kanal B+ Eingang
|
|
2
|
EB-
|
I
|
Encoder Kanal B- Eingang
|
|
3
|
EA+
|
I
|
Encoder Kanal A+ Eingang
|
|
4
|
EA-
|
I
|
Encoder Kanal A+ Eingang
|
|
5
|
VCC
|
O
|
+5V @ 100 mA max.
|
|
6
|
EGND
|
GND
|
Signal Masse
|
|
Encoderkabel Anschluß
|
|||
|
Draht
|
Farbe
|
Name
|
Beschreibung
|
|
1
|
Rot
|
VCC
|
+5V power input
|
|
2
|
Weiß
|
GND
|
5V Masse
|
|
3
|
Schwarz
|
A+
|
Encoder Kanal A+
|
|
4
|
Blau
|
EA-
|
Encoder Kanal A-
|
|
5
|
Gelb
|
EB+
|
Encoder Kanal B+
|
|
6
|
Grün
|
EB-
|
Encoder Kanal B-
|
|
Eingangsspannungs- und Motor Anschluß - Schraubanschluß
|
|||
|
Pin
|
Name
|
I/O
|
Beschreibung
|
|
1
|
A+
|
O
|
Motor phase A+
|
|
2
|
A-
|
O
|
Motor phase A-
|
|
3
|
B+
|
O
|
Motor phase B+
|
|
4
|
B-
|
O
|
Motor phase B+
|
|
5
|
+V
|
I
|
Eingangsspannung (Positiv), 30-72 VDC empfohlen, um für Spannungsschwankungen und “back-EMF“ Spielraum zu haben
|
|
6
|
GND
|
GND
|
Eingansspannung - (Negativ)
|
|
RS232 Kommunikationsanschluß
|
|||
|
Pin
|
Name
|
I/O
|
Beschreibung
|
|
1
|
NC
|
-
|
Nicht angeschlossen
|
|
2
|
+5V
|
O
|
+5V Ausgang
|
|
3
|
TxD
|
O
|
RS232 Datenausgang
|
|
4
|
GND
|
GND
|
Masse
|
|
5
|
RxD
|
I
|
RS232 Dateneingang
|
|
6
|
NC
|
-
|
Nicht angeschlossen
|
TYPISCHE ANSCHLUSSARTEN:
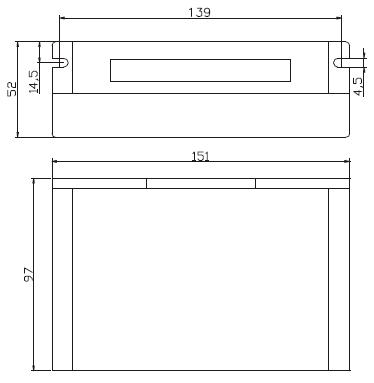
MECHANISCHE SPEZIFIKATION (Einheit: mm):
Deutsch
