

Closed Loop Schrittmotor Steuerung
Modelle CS-D808/ CS-D1008
Digitaltechnik, max. 80/ 100 VDC, 8,0 A
 Datenblatt herunterladen
Datenblatt herunterladen ProTuner CS-D Software herunterladenAnschlussbeschreibung (englisch) herunterladenSoftwarehandbuch (englisch) herunterladenRS232 pin layout herunterladen
ProTuner CS-D Software herunterladenAnschlussbeschreibung (englisch) herunterladenSoftwarehandbuch (englisch) herunterladenRS232 pin layout herunterladen
Der Leadshine CS-D808/ CS-D1008 ist ein Schrittmotortreiber mit geschlossenem Regelkreis, der das Problem der Schrittverluste von Schrittmotorsteuerungen mit offenem Regelkreis löst und die Systemzuverlässigkeit bei minimalen Mehrkosten erhöht. Der fortschrittliche Regelalgorithmus beruht auf zehnjährige Erfahrung von Leadshine im Bereich der Schrittmotor- und Servomotor Regelung. Mit dieser betreibt er den Schrittmotor mit reduzierter Erwärmung, Geräuschentwicklung, Vibration. Der CS-D808/
CS-D1008 ist äußerst zuverlässig und preisgünstig und eignet sich ideal für viele industrielle Anwendungen wie z.B. CNC, Medizin, Elektronik, Verpackung.
Der CS-D808/ CS-D1008 kann 2-Phasen-Schrittmotoren mit Inkrementalgebern ansteuern. Im Vergleich zu konventionellen Schrittmotorsystemen mit offenem Regelkreis kann ein CS-D808/ CS-D1008 mit geschlossenem Regelkreis mögliche Schrittverluste eliminieren, eine Positionsfehlerkorrektur in Echtzeit durchführen und muss hierfür kein Drehmoment vorhalten.
- Closed-loop, geschlossener Regelkreis ohne Schrittverluste
- Verbesserte Leistung bei Anwendungen mit niedrigen Drehzahlen( < 60 RPM)
- Kein vorhalten von Drehmoment für Positionsfehlerkorrektur
- Keine Einstellungen erforderlich für einfache Inbetriebnahme
- Versorgungsspannung CS-D808: 30 - 80 VDC, CS-D1008: 30 - 100 VDC
- Ausgangsstrom von max. 8 A
- Eingangsfrequenz bis max. 200 kHz
- Konfigurierbarer Digitalausgang für "In Target Position Range"-Signal oder als Bremsbefehlssignal
- Mikroschrittauflösung (15 Einst.) von 800 - 51.200 über DIP-Schalter oder 200 - 51.200 per Software
(200er-Schritten) - Schutzfunktionen gegen Überspannung, Überstrom und Positionsfehler
|
Parameter
|
Min | Typ. |
Max
|
Unit |
|
Ausgangsstrom
|
0,5
|
-
|
8,0 (Peak)
|
A
|
|
Versorgungsspannung
CS-D808 |
+30
|
-
|
+80
|
VDC
|
|
Versorgungsspannung
CS-D1008 |
+30
|
-
|
+100
|
VDC
|
|
+20
|
-
|
+80
|
VAC
|
|
|
Steuerstrom
|
7
|
10
|
16
|
mA
|
|
Puls-Eingangsfrequenz
|
0
|
-
|
200
|
kHz
|
|
Pulsweite
|
2,5
|
-
|
-
|
µs
|
|
Ansteuerzeit Richtungswechsel
|
5,0
|
-
|
-
|
µs
|
|
Isolationswiderstand
|
500
|
MΩ
|
|
Kühlung |
Natürliche Kühlung bzw. Zwangskühlung |
|
|
Arbeitsumgebung |
Umgebung |
Staub, Ölnebel, korrosive Gase vermeiden |
|
Umgebungstemperatur |
0 - 65 °C |
|
|
Luftfeuchtigkeit
|
40 - 90 % RH |
|
|
Arbeitstemperatur
|
0 - 50 °C |
|
|
Vibration |
10 - 50 Hz/ 0,15 mm |
|
|
Lagertemperatur |
-20 - 65 °C |
|
|
Gewicht |
ca. 570 g |
|
|
Steuersignal - Anschlussbelegung |
|||||||||||
|
Name |
I/O |
Beschreibung |
|||||||||
|
PUL+ |
I |
Pulssignal: (2) Im Doppelpuls-Steuermodus (CW/ CCW), eingestellt über die PC-Software, ist dieser Signaleingang für den Puls im Uhrzeigersinn (CW) mit Pegeln High bzw. Low. (3) High Pegel: 4,5 - 5 V/ Low Pegel: 0 - 0,5 V (gilt auch für DIR- und ENA-Signale). (4) Die Pulsbreite sollte auf 2,5 μs oder länger eingestellt werden. |
|||||||||
|
PUL- |
I |
||||||||||
|
DIR+ |
I |
Richtungs-Signal: (1) Im Puls-Richtungs-Modus werden über diesen Eingang mit Low/ bzw. High-Pegel diebeiden Laufrichtungen des Motors gesteuert (CW/ CCW). (2) Im Doppel-Puls-Modus (CW/ CCW) ist an diesem Eingang das Eingangspulssignal anzulegen, das den Lauf gegen den Uhrzeigersinn (CCW) steuert mit den Pegeln High bzw. Low. (3) DIR Signal sollte mindestens 5 µs vor dem PUL Signal anliegen. (4) Das Austauschen von zwei Leitungen, der an der Steuerung angeschlossenen Motoren,führt auch zur Umkehr der Drehrichtung. Die Drehrichtung kann auch mit Betätigung des DIP Schalter SW5 gewechselt werden. |
|||||||||
|
DIR- |
I |
||||||||||
|
ENA+ |
I |
Aktivierungs-Signal: Dieses Signal wird zur Aktivierung/ Deaktivierung der Steuerung verwendet. High Spannungs-pegel von 4,5 - 24 V (NPN-Steuersignal) zur Freigabe des Antriebs und Low Spannungspegel von 0 - 0,5 VDC zur Deaktivierung des Treibers. Bitte beachten Sie, dass das Signal bei Verwendung von PNP-Logik und Differenz-Ausgangssignal gegensätzlich arbeitet, nämlich Low-Pegel für Aktivierung. Standardmäßig bleibt dieses Signal unbeschaltet & Treiber aktiviert. |
|||||||||
|
ENA- |
I |
||||||||||
|
Status-Signalanschluss |
|||||||||||
|
Name |
I/O |
Beschreibung |
|||||||||
|
Pend+ |
O |
Konfigurierbares digitales Ausgangssignal:: |
|||||||||
|
Pend- |
O |
||||||||||
|
ALM+ |
O |
Alarmsignal: |
|||||||||
|
ALM- |
O |
||||||||||
|
Encoder-Feedback-Anschluss |
|||||||||||
|
Name |
I/O |
Beschreibung |
|||||||||
|
EB+ |
I |
Encoder Kanal B+ Eingang |
|||||||||
|
EB- |
I |
Encoder Kanal B- Eingang |
|||||||||
|
EA+ |
I |
Encoder Kanal A+ Eingang |
|||||||||
|
EA- |
I |
Encoder Kanal A- Eingang |
|||||||||
|
VCC |
O |
+5 V @ 100 mA max. |
|||||||||
|
EGND |
GND |
Signal Masse |
|||||||||
|
Encoder-Verlängerungskabel Verdrahtung |
|||||||||||
|
Draht |
Farbe |
Name |
Beschreibung |
Draht |
Farbe |
Name |
Beschreibung |
||||
|
1 |
Rot |
VCC |
+5 V Versorgungsspannung |
4 |
Blau |
EA- |
Encoder Kanal A- |
||||
|
2 |
Weiß |
GND |
5 V Masse |
5 |
Gelb |
EB+ |
Encoder Kanal B+ |
||||
|
3 |
Schwarz |
EA+ |
Encoder Kanal A+ |
6 |
Grün |
EB- |
Encoder Kanal B- |
||||
Notes:
(1) Geschirmte Steuersignalleitungen werden empfohlen
(2) Zur Reduzierung und Vermeidung von Störungen Steuerleitungen und Leitungen der Versorgungsspannung nicht in direktem Kontakt verlegen
|
Eingangsspannungs- und Motoranschluss |
||||
|
Pin Name |
I/O |
CS-D808 Beschreibung |
||
|
A+ |
O |
Motor Phase A+ |
||
|
A- |
O |
Motor Phase A- |
||
|
B+ |
O |
Motor Phase B+ |
||
|
B- |
O |
Motor Phase B- |
||
|
+V |
I |
Eingangsspannung (Positiv), 30 - 80 VDC |
||
|
GND |
GND |
Eingangsspannung (Negativ) |
||
|
|
|
CS-D1008 Beschreibung |
||
|
A+ |
O |
Motor Phase A+ |
||
|
A- |
O |
Motor Phase A- |
||
|
B+ |
O |
Motor Phase B+ |
||
|
B- |
O |
Motor Phase B- |
||
|
AC |
I |
Eingangsspannung 30 - 100 VDC |
||
|
AC |
I |
|||
|
RS232 Kommunikationsanschluss |
||||
|
Pin |
Name |
I/O |
Beschreibung |
 |
|
1 |
NC |
- |
Nicht angeschlossen |
|
|
2 |
+5V |
O |
+5V Ausgang |
|
|
3 |
TxD |
O |
RS232 Datenausgang |
|
|
4 |
GND |
GND |
Masse |
|
|
5 |
RxD |
I |
RS232 Dateneingang |
|
|
6 |
NC |
- |
Nicht angeschlossen |
|
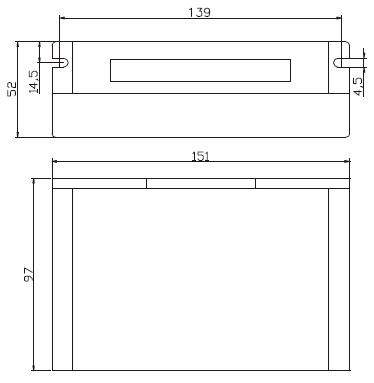
((Einheit: mm)
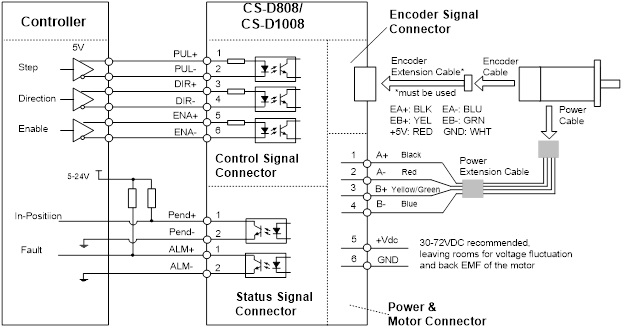
Ein komplettes Closed-Loop-Schrittmachersystem sollte einen Schrittmotor mit Encoder, CS-D808/ CS-D1008-Treiber, Netzteil und Controller (Impulsgeber) umfassen. Ein typischer Anschluss ist abgebildet.
Der CS-D808/ CS-D1008 kann differenzielle und unsymmetrische Steuersignaleingänge (Open-Collector und PNP-Ausgang) akzeptieren. Ein CS-D808/ CS-D1008 hat 3 optisch isolierte Steuereingänge, PUL, DIR und ENA. Siehe die beiden folgenden Abbildungen für die Anschlüsse von Open-Collector- und PNP-Signalen.
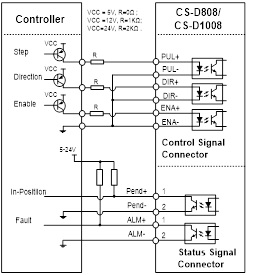 Anschluss an PNP-Signal(common-cathode) |
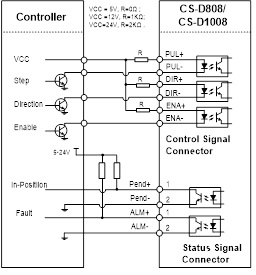 Anschluss an open-collector Signal(common-anode) |
